Projets:Bionicohand
| Bionicohand
| |
|---|---|
| Ce projet recherche ces compétences :
Communication, Design, Développement logiciel, Electronique, Impression 3D, Mécanique, Mécatronique, Résistance des matériaux, Usinage | |
| Informations | |
| Description | Prothèse myoélectrique destinée aux personnes amputées du membre supérieur |
| Catégorie | Membre supérieur |
| Etat d'avancement | En cours |
| Techniques | |
| Durée de fabrication | |
| Coût matériel | |
| Niveau | |
| Licence | by-sa |
| Date de création | 2022-07-21 |
| Équipe | |
| Porteur de projet | Nicolas HUCHET |
| Contributeurs | Nicolas HUCHET, Sébastien CARRIOU, Côme BUTIN, Henri BOUTARD, Jean FORREST, Christophe BRAILLON, Christian FROMENTIN, Michel MARECHAL, Yann CORBEL, Anciens contributeurs : Francois LE BERRE, Alexandre LE FALHER, Léa SUCRE, Joris FAREU, Samir EL BASRI, Claude RELLET |
| Fabmanager | Nicolas HUCHET |
| Référent documentation | Nicolas HUCHET |
| Nom humanlab | Humanlab_MHK |
| Documentation | |
| Statut de la documentation | Partielle |
| Relecture de la documentation | Non vérifiée |

Description du projet
Une myohand (prothèse myoélectrique) est destinée aux personnes amputés du membre supérieur afin de retrouver une autonomie au quotidien (vie sociale, professionnelle, transport etc.), bien que très utile, elles sont souvent rejetées par les utilisateurs (poids, contrôle, apparence, maintenance) ou trop chères. Le projet est d'inventer une myohand accessible et acceptable, dont les plans de fabrications sont partagées dans le bien commun avec une Revue Technique permettant d'être en capacité d'effectuer la maintenance.
Plus d'informations sur le BIONICOHAND
Cahier des charges
Bionicohand : main bionique open source. Cahier des charges
Description technique


.jpg)




Evolutions pas à pas
La cinématique de la main Bionicohand consiste à reproduire les mouvements décrits dans le cahier des charges au moyen d'un seul actionneur, dans cet ordre et vice versa:
- Pince tri-digitale fermé (pouce en opposition par rapport au majeur et l'index)

- Pince tri-digitale ouverte

- Pince latérale ouverte

- Pince latérale fermé

2021/07 Mécanisme de préhension
Stagiaires INSA & Orthopus
Création d'un système bielle-rotule pour l'ouverture-fermeture :
Des étudiants successifs encadrés par la start up handitech Orthopus ont conçu un système bielle-rotule permettant d'entraîner le pouce et le majeur en même temps. Ce concept inexistant dans les prothèses permet une ouverture/fermeture de la main. Il n'inclut pas le changement de position du pouce en position opposition/latérale qui doit être effectué manuellement.

Le système bielle rotule est visible en 3D ICI
Le rapport de stage de Luc Doppler de l'INSA Strasbourg est consultable ICI
2021/10 Abduction motorisé + Alimentation
Fabrikarium -ArianeGroup/My Human Kit- Bordeaux
Abduction motorisé du pouce :
Durant les 3 jours du hackathon qui a regroupé des ingénieurs d'ArianeGroup, Orthopus, Akkodis et ISIR, un système mécanique a été inventé, ajouté à la conception précédente et imprimé en 3D. Ce nouveau mécanisme de lier mécaniquement l'ouverture/fermeture ainsi que le changement de position du pouce à l'aide d'un seul actionneur.
- Objectifs
- Créer un mécanisme d’abduction du pouce (mouvement permettant de le positionner en position latérale ou opposée) motorisé (sans intervention manuelle avec la main opposée).

- Modification du mécanisme développé par MHK et Orthopus
Visualisation du système mécanique bielle rotule originale et fichier.STEP original myhohand
- Ce modèle permet le déplacement du pouce à l'aide de l'autre main et non de manière automatique


- Création d'une cinématique
- Modélisation
Afin d'imaginer les solutions techniques possibles, un système a bielle à été créer pour que les liaisons nécessaires aux différents mouvements soient possibles.
Cette cinématique est un outils de préparation à l'intégration des nouvelles pièces, elle permet d'ajuster la taille et l'emplacement des pièces pour installer le nouveau système.
L'animation ci-dessous montre les différents mouvements du pouce selon le sens de rotation du moteur:
- Modification du support supérieur du pivot pouce
- Le support à été modifier pour autorisé les différents mouvement de pivot du pouce.

- Ajout d'une poulie pour simuler la motorisation
- Pour ce prototype le mouvement sera générer manuellement et non pas par un moteur.

- Créations de pièces mécaniques
Pivot Pouce
- La pièce en jaune forme fera pivoter le pouce via une liaison avec le disque couplé au moteur.


Motorisation du majeure par bielle
- L'entraînement du majeure sera effectué par une bielle accouplé au disque couplé au moteur.

- Mise en œuvre
- Impression 3D
Petit aperçus de l'évolution des pièces du prototype imprimés en 3D








- Références/ Sources
Il est possible de télécharger les fichiers de conception dans un logiciel de CAO afin de poursuivre les améliorations Voici les fichiers du proto développé pendant le Farbikarium et retouchés un peu après. Il y a :
- le fichier natif Fusion .f3d se trouve DOWNLOAD .f3D files HERE
- le fichier .setp comptabile avec d'autres logiciels de CAO Kinematic_Myohand_fabrikarium.step.zip DOWNLOAD .step files HERE
- Un zip avec tous les fichier STL pour de l'impression et de la visualisation DOWNLOAD .stl Files HERE
les fichiers natifs Solidworks avant la modification sont ICI
Alimentation
- Le système d'alimentation comporte les éléments suivants:
- Batterie : Alimente la main électrique et les électrodes
- BMS (Batery Management System) : Gère la charge/décharge de la batterie et protège contre les courts circuits
- Convertisseur DC/DC : Assure la stabilité du voltage
- Interrupteur ON/OFF : Coupe l’alimentation de la main permettant de maintenir un objet serré sans contraction
- USB in : Port de recharge de la batterie (micro USB, USB-C...)

- Choix du moteur DC
Ce modèle à été sélectionné pour sa compacité et ses performances. D'après la documentation technique du micromoteur à courant continu sa tension nominale est de 6V mais sera utilisé à 7,4V, il est donné pour 1,6A.
- Choix des batteries

- Lithium Ion 18650
- + moins fragile/sensible que lipo
- - taille importante

- Lithium Polymère
- -danger si batterie percée
- + gain de place
- Choix du convertisseur DC/DC
Objectifs :
Déterminer le matériel capable de maintenir une tension stable en sortie en fonction du taux de charge de la batterie.
La charge du moteur sera simulée par une résistance de 250W de valeur :
- 5 Ohm pour le fonctionnement en charge du moteur
- 10 Ohm pour le fonctionnement nominale du moteur
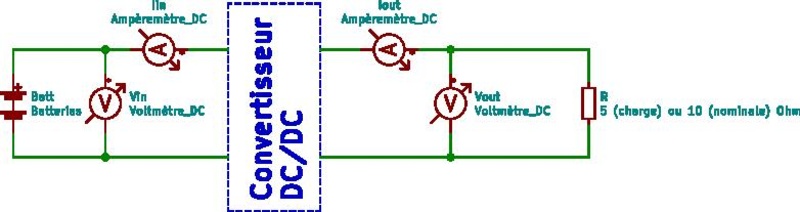
Ce circuit permet de déterminer les caractéristiques "réel" du convertisseur pour déterminer sa fiabilité dans des conditions extrêmes : batterie faible, charge moteur élevée et charge nominale.
On mesure alors les tensions et courants d'entrée Vin / Iin et de sortie Vout / Iout
La températures des composants est déterminé grâce à une caméra thermique.

- Test des convertisseurs DC/DC
MT3608 et XL4005E1
MT3608 : tension d'entrée 2-24V, tension de sortie 5-28V, max 2A

carte XL4005E1 : tension d'entrée 5-32V, tension de sortie 0.8V-30V, 5A nominal, max 8A.

Tableau de mesures

Conclusion :
La carte MT3608 ne tient plus ses spécifications lorsque l'on dépasse 1A.
Elle n'a donc pas les caractéristiques nécessaires pour alimenter le moteur dans les conditions envisagées.
La carte XL4005E1 est surdimensionnée (5A) mais elle génère une tension de sortie plus stable et propre. Par contre elle ne fonctionne qu'en abaisseur de tension à partir de 5V donc nécessite 2 batteries de 3,7V. soit 8,4V ce qui ne gène en rien l'usage que l'on souhaite en faire.
- Choix du chargeur de batterie
Objectifs :
Le chargeur ou BMS doit pouvoir gérer la charge et la décharge des batteries tout en assurant la protection (décharge profonde, échauffement) de celle-ci.
L'acronyme BMS signifie Battery Management System.
- Test de chargeurs de batterie
Modèle HX-2S-JH20 10A
- - Demande une tension d'entrée élevée (8,4-9V) ce qui nécessite un convertisseur afin d'élevé la tension de deux batteries (3,7x2=7,4V)
- - Gestion complexe des entrées/sorties en fonction de la charge ou décharge de la batterie : ce sont physiquement les mêmes broche du circuit

Modèle à base de TP4056
- Ce modèle permet de chargé une seule batterie

infos sur le chargeur de batterie TP4056
- Mise en parallèle des deux modules TP4056
- Pour charger deux batteries il est nécessaire d'utiliser deux modules

- Problème
- La mise en parallèle de deux circuits de chargeTP4056 pose un problème d'isolation électrique entre les deux circuits.
- En effet le fait de disposer d'une seule alimentation 5V commune pour les deux modules créer un court circuit au niveau du second circuit. Le OUT+2 est connecté au OUT-1 qui est lui même relié au -5V. De ce fait la borne OUT-2 se retrouve au même potentiel que la borne OUT+2 et créer un court-circuit franc.
- Solutions 1
- La solution la plus simple à mettre en place consiste à intégrer un double interrupteur N0/NC qui permet de mettre en parallèle le 5V pendant la charge et isoler les deux batteries. Pendant l'utilisation l'inter 1 sera ouvert et l'inter 2 sera fermé, ce qui nous permet de mettre en série les deux batteries et isoler les deux entrées 5V.

- Solution 2
- La seconde solution consiste à utiliser deux convertisseur DC/DC 5V vers 5V pour isoler galvaniquement l'entrée des deux circuits.

- Test indicateur de charge à led
Modèle HW-798A
- Il comporte 4 leds
- De base, il est calibré pour indiquer le niveau de batterie de 1 cellule (entre 3 et 4 V environ). Il faut souder le jumper J1 pour passer à un niveau de batterie de 2 cellules (première led à 6.6V et dernière led à 7.9V)

Lien pour se procurer la carte HW-798A-4 sur alibaba
- Connexion des différents éléments
Il s'agit de connecter les différents modules : batterie, carte de charge/protection, convertisseur DC/DC, indicateur de charge, interrupteur.
Cet assemblage comprend deux convertisseurs MT3608 (ne pouvant gérer qu'un ampère) montés en parallèle afin de gérer les 1,6A nécessaire au fonctionnement du moteur.
Pour le test nous avons connecter une pince munie de moteur.


schéma au format pdf
- Étude d'intégration du matériel dans l’emboîture
Objectifs
- Intégrer le matériel nécessaire à l'alimentation du moteur en fonction des composants choisis et des contraintes d'usage




Cet exemple comprends les modules sélectionnés plus haut, ces cartes sont disponibles dans le commerce et ne sont pas forcément adaptés en dimensions. Tout comme les connections entre les modules ne sont pas tout à fait en accord avec le cahier des charges. Il sera sans doute préférable de développer un circuit permettant de prendre en compte les contraintes d'espace et la dissipation thermique nécessaire aux différents composants.
Les fichiers originaux se trouvent ici, ils ont été créer avec le logiciel catia mais contient aussi le fichier au format .stp.
Sources/Référencess
- Moteur à tester pour le système de batterie : (tension nominale 6V) :
https://www.faulhaber.com/fileadmin/Import/Media/FR_2224_SR_DFF.pdf
- Logiciel open source pour visualiser / modifier les fichiers STEP
https://www.freecadweb.org/downloads.php
- Logiciel open source pour créer des schémas électroniques et des pcb
https://www.kicad.org/download/
2022/06 Bionicohand V1
BTS CIM -Lycée Saint Aubin La Salle- Angers
C'est la fabrication d'un premier prototype :
En se basant sur le POC (proof of concept) réalisé à la fin du Fabrikarium, le professeur Henri Boutard et les étudiants du BTS du lycée ont fait évolué et terminé la conception pour en faire un prototype fonctionnel qui est usiné en aluminium. Cette étude s'est déroulé le cadre du BTS CIM (Conception et Industrialisation en Microtechniques) de janvier à juin 2022.
-Principe_de_fonctionnement-.jpg)
UNE VIDEO EST ICI OU LE PROTOTYPE EST EN FONCTIONNEMENT
Un actionneur (servomoteur) monté sur un berceau entraine en rotation une roue dentée sur laquelle est montée une bielle qui entraine en rotation le majeur. Sous le majeur une tige de poussée appui sur le pouce qui se ferme à la descente du majeur. Le pouce peut prendre 2 positions Abduction ou Adduction grâce à la rotation de son embase dans ces 2 positions. Le changement de position de l’embase est réalisé par un basculeur entraîné par la roue dentée en fonction du sens de rotation. Le basculeur par une fourchette agit sur un ergot de l’embase pouce qui bascule dans la nouvelle position sous l’action d’un ressort qui le pousse en butée. Le sabot cranté situé sous la roue dentée agit comme un bloqueur sous l’action d’un ressort quand le berceau de l’actionneur reprend sa position centrale.
La conception a été réalisé sur Solid Works 2022. Contactez-nous si vous souhaitez les fichiers natifs ou les fichiers STEP : contact(at)myhumankit.org
2022/07 Revue conception V1 + Alimentation
Akkathon Bionicohand -Akkodis/My Human Kit- Lyon
Revue de conception Cet évènement a permis de proposer des améliorations sur la Bionicohand V1. La liste des propositions d'améliorations est consultable ICI. Trois ont été retenue pour le hackathon:
- Suppression du jeu du pouce (2 propositions)
- Re-conception du châssis
- Intégration d'un moteur pour la rotation du pouce
L'arbre à Côme et la came ro-coeur :
Des modifications ont été apporté au système de basculeur (qui permet le changement de position du pouce) pour supprimer le jeu dans le pouce et éviter la perte d'un objet lors du serrage. Voici les 2 solutions proposées, (les noms des systèmes mécaniques ont été inventés) :

Re-conception du châssis:
Il a été décidé de concevoir le chassis en plusieurs bloc pour faciliter l'usinage à la fabrication, les différentes étapes du processus sont expliqué sur ce document Akkathon Bionicohand report rédigé par Paolo

Les conceptions sont à terminer, valider, fabriquer et tester.
L'intégration d'un micro actionneur (REFERENCE) pour motoriser le changement de position du pouce a été étudié pour le faible coût et le peu d'encombrement du moteur. Rapidement a été constaté que cet actionneur ne résisterait pas aux forces soumises au pouce.
Le Akkathon Bionicohand était un évenemet co-organisé entre My Human Kit et l'entreprise Akkodis, 6 ingénieurs réparties en 2 équipes ont poursuivie la R et D.

L’équipe mécanique était constituée de Côme Butin, ingénieur Orthopus en robotique, de Joris Fareu, ingénieur ArianeGroup sur les fusées Ariane et de Paolo Bianchino du Rehab Technologies Lab de Istituto Italiano di Tecnologia (prothèse de main anthropomorphique Hannes).
Alimentation
Inventer un système d'alimentation électrique discret, fiable, abordable et sans danger pour le bon fonctionnement de la prothèse myoélectrique.
Cahier des charges
Pour la définition du système de batterie on se base sur un actionneur pré existant :
- 6V puissance max 8,5 W
- Batterie alimentant le système : 6,5Wh
Spécifications
- Volume de batterie max : Longueur 650, épaisseur, 18, profondeur 36 avec un volume max de (TBD)
- Poids max : 70 g
- Volume de la carte : inférieur ou égale au volume max de la batterie
- Température d'utilisation : -10 à 45 °C
- Température de stockage : 0 à 60 °C
- Composants standards (ex: accumulateurs 18650) et de préférence discrets (ex : accumulateurs 14500)
- Interrupteur pour éteindre et allumer la prothèse instantanément (pas de temporisation à la mise hors/sous tension)
- Indicateur visuel de niveau de la batterie
- Dispositif sécuriser et sécurisant (dissipation thermique des composants, gestion des éléments de la batterie)
- 2 solutions de d'utilisation peuvent être envisagées :
- une batterie interchangeable qui se charge sur un chargeur externe (plus pratique car interchangeable rapidement mais peu esthétique)
- une batterie et un chargeur intégré dans la prothèse (plus esthétique et charge avec un cable standard mais temps d'attente lors du chargement de la batterie)
Akkathon Bionicohand (AKKA/My Human Kit juillet 2022)
Suite au Fabrikarium 2021 (voir Alimentation Fabrikarium 2021), des ingénieurs d'Akkodis (une entreprise partenaire du projet) ont conçue une carte d'alimentation sur mesure répondant aux besoins décrits dans le cahier des charges.

Cette carte est conçue pour la batterie PA-L2 et seulement pour les batteries Lithium ion ayant une tension finale de 4,2V.

Fabrication de la carte
Défi à relever durant les 3 jours du Akkathon. Tous les composants ont été commandé et le PCB fabriqué en amont pour l’événement.
Le PCB (Printed Circuit Board)

Le PCB est une carte en époxy (FR4 dans notre cas) sur laquelle est imprimée le circuit électronique et les trous de perçages permettant d'y souder les composants.
Les fichiers GERBER et DRLL sont téléchargeable ICIpour faire fabriquer le PCB en ligne.
Composants
Cliquez ici pour consulter la liste des composants.
Généralement les composants sont soudés sur le PCB en passant par un four. Dans notre cas, nous avons utilisé un poste de soudure. Les composants U1, U2, U3, U4, U5, Q1, Q2 étant petits (pas fin, 0,5 mm) sont monté en premiers par refusion (brasage). Les autres composants sont soudés à la main ou monté directement sur le PCB.
Schéma de la carte

Legende de la liste des composants:
C = Condensateur ; D = Diode ; J = Connecteur ; L = Inductance ; R = Résistance ; Q = Transistor ; U = Circuit intégré ; SW = Switch Button ; X = Divers
Matériel
- Microscope à écran LCD (TOMLOV)
- Station de soudage à panne fine (yihua 8786D)
- Crème de brasage
- Nettoyant de flux
- Pinces brucelle
- Oscilloscope
- Alimentation stabilisé
- Multimètre
- Fil électrique....
La réalisation des soudures est une tâche qui demande beaucoup de dextérité, patience et de l'expérience. Il est recommandé de se rapprocher d'experts dans le domaine (entreprises industrielles, fablabs, lycées techniques...).
Le bilan des recherches ayant conduit à la création de cette carte est consultable ICI
2023/05 Outil collaboratif Gitlab
Dans le cadre d'un accompagnement avec le Cowork'HIT, des stagiaires ont crée et mis en ligne les travaux. On peut y trouver les plans de :
Cette plateforme a pour but de permettre aux différents partenaires de mettre en ligne leurs versionnage des travaux
2023/06 Bionicohand V2 + Alimentation
BTS CIM -Lycée Saint Aubin La Salle- Angers
Fabrication d'un deuxième prototype en se basant sur les revues de conception, sujet d'étude pour des BTS CIM 2 ème année (Conception et Industrialisation en Microtechniques):
- Réduction générale de la taille de la main pour faire une taille S :
Pour cela, Henri a pris comme référence la main d'une femme de taille "standard" comme référence de main
- Utilisation d'un micromoteur à la place du servomoteur
Nous avons utilisé le micromoteur Faulhaber 2224SR car il est utilisé dans une prothèse qui développe la puissance que nous souhaitons atteindre avec la main (force de serrage min. 70N, vitesse de fermeture min. 300mm/sec)
- Fabrication d'un système de réduction
Certains engrenages ont été récupéré de servomoteurs, d'autres pièces ont été usinées
- Fabrication d'un mécanisme d'irréversibilité
Cette fonction est essentielle dans une prothèse de main, elle permet le maintient de l'objet sans fournir de courant à la main (la main est bloquée en position quand elle n'est pas alimentée)
- Optimisation du système de rétro-pulsion du pouce (abduction/adduction)
Mise en pratique de l'idée de "l'arbre à Côme" proposée au hackathon avec Akkodis
- Optimisation de la fabrication des doigts
Certains ont été fabriqué par usinage, d'autres par injection plastique
2023/07 Objectif Cybathlon 2024
Rencontre avec le consortium du projet au Cowork'HIT
Fichiers (open) sources
Nous utilisons la plateforme Gitlab pour le dépot des plans de conception. Les fichiers sont en .STEP et fichers natifs.
Le logiciel utilisé pour la conception mécanique est Solid Works 2021 EDU Le logiciel utilisé pour la conception de la carte électronique est KiCAD
