Différences entre versions de « Supports peda:Drawbot - technologie et arts plastiques »
| Ligne 105 : | Ligne 105 : | ||
* Ressources en anglais sur [https://kitronik.co.uk/blogs/resources/online-resources-for-move-motor-microbit le site du fabricant du robot Move KitroniK] | * Ressources en anglais sur [https://kitronik.co.uk/blogs/resources/online-resources-for-move-motor-microbit le site du fabricant du robot Move KitroniK] | ||
* PDF kitronik Move Motor traduit de l'anglais - Alignement des moteurs [[:File:tutoriel d'alignement des moteurs.pdf]] | * PDF kitronik Move Motor traduit de l'anglais - Alignement des moteurs [[:File:tutoriel d'alignement des moteurs.pdf]] | ||
| − | * PDF kitronik Move Motor traduit de l'anglais - Dessin de cercles | + | * PDF kitronik Move Motor traduit de l'anglais - Dessin de cercles [[:File:tutoriel dessin de cercles.pdf]] |
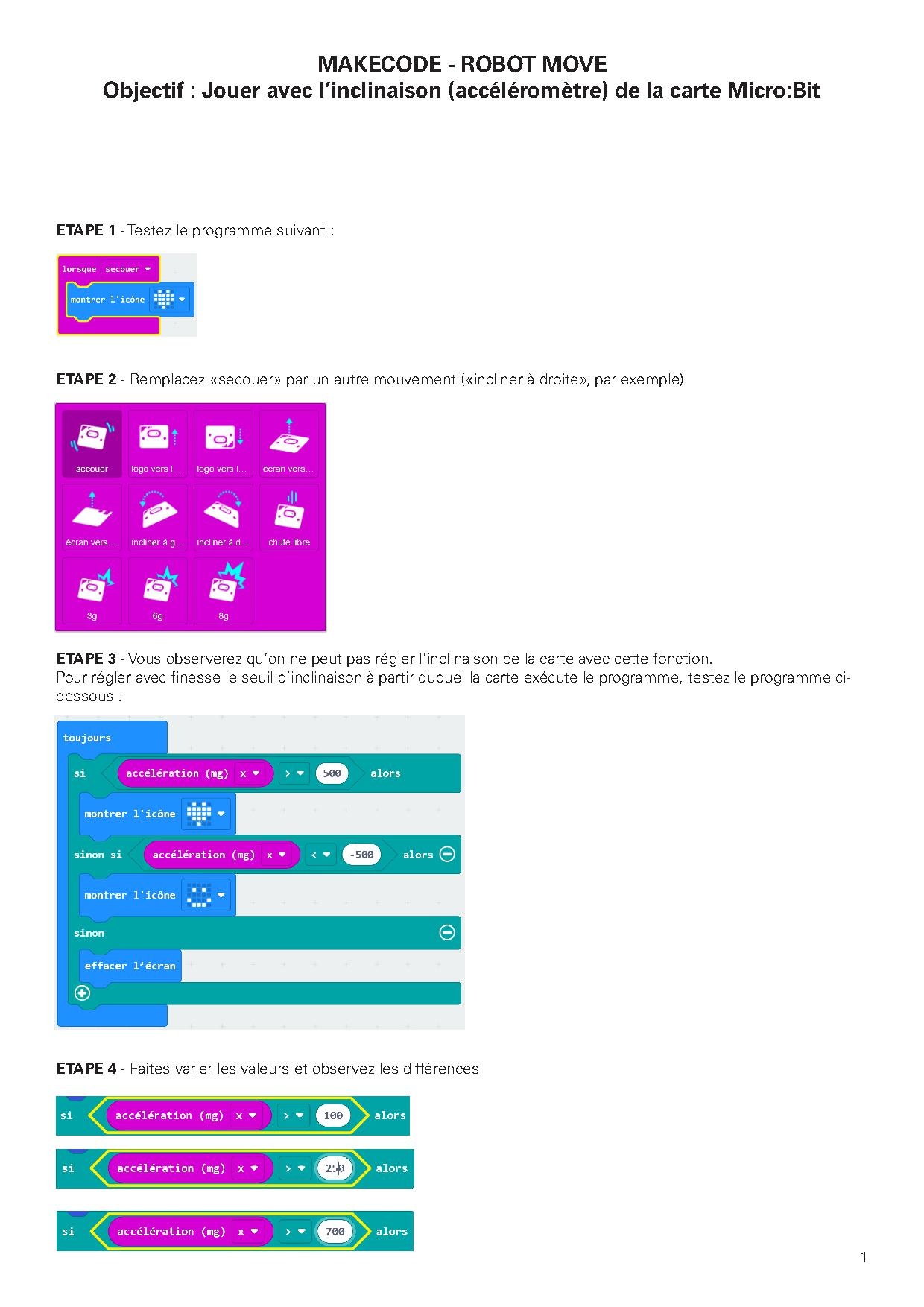
| + | * Tutoriels et travaux pratiques [[File:tutoriel dessin de cercles.pdf]] | ||
| + | [[File:TP MAKECODE ROBOT MOVE KITRONIK.pdf]] | ||
| + | |||
* [https://padlet.com/pascaleberthelot/iijn75qhoap7pgzy liens padlet Pascale] | * [https://padlet.com/pascaleberthelot/iijn75qhoap7pgzy liens padlet Pascale] | ||
<br> | <br> | ||
Version du 17 juillet 2023 à 12:16
| Drawbot - technologie et arts plastiques
| |
|---|---|
| Informations | |
| Description | Concevoir des robots qui dessinent et créer une fresque collective |
| Public | IEM, collège |
| Discipline associée | mathématiques, technologie, arts plastiques |
| Format d'atelier | classe entière |
| Nombre d'encadrants | 3 |
| Apprentissage | idéation, conception, modélisation 3D, impression 3D, dessin 2D, programmation, électronique, fabrication, culture fablab |
| Type d'atelier | projet collectif (les différents publics participent à un même projet commun) |
| Nombre de séances | 18 |
| Durée de séance | 2h |
| Techniques | micro-bit, modélisation 3d, moteur, radio, Makecode |
| Coût matériel | Plus de 200 euros |
| Etat d'avancement | En cours |
| Catégorie | Motricité Troubles cognitifs |
| Licence | cc by-sa |
| Équipe | |
| Contributeurs | Pascale Berthelot, Ceylan Ekici, Patrick Brochec, Cécile Boclè |
| Fabmanager | Lucie |
| Partenaires: | le collège De Fontenay (Chartres-de-Bretagne), l'Institut d'Education Motrice Rey Leroux (La Bouëxière), Edulab Pasteur |
| Nom humanlab | Humanlab_MHK |
| Documentation | |
| Statut de la documentation | Partielle |
| Relecture de la documentation | Non vérifiée |

Origine du projet
Depuis janvier 2019 au sein de plusieurs structures dans le cadre d’un projet pilote soutenu et accompagné par le Conseil Départemental d’Ille-et-Vilaine.
Ce projet vise à sensibiliser au handicap via la mise en place d’ateliers numériques partagés entre jeunes en situation de handicap ou non. Les ateliers numériques mis en place remplissent trois différents rôles : la socialisation des différents publics, le développement d’aides techniques aux handicaps et la sensibilisation aux problématiques liées aux handicaps, via l’initiation à la fabrication numérique. Ces ateliers sont destinés à être partagés à l’ensemble de la communauté éducative.
Description de la séquence
Les vingt-huit collégiens de la classe de 4èmeC du collège De Fontenay (Chartres-de-Bretagne) ont travaillé pendant un an avec 14 jeunes de l’Institut Éducation Motrice Rey Leroux (La Bouëxière). Ce projet a été mené en lien avec les programmes de technologie, de mathématiques et d’artsplastiques côté collège, tandis qu’à l’IEM le projet a été porté par l’ergothérapeute, l’enseignante et le personnel soignant du centre.
Nous avons mené un projet collectif en concevant et
utilisant des drawbots. Un drawbot est un robot qui
dessine. Il en existe une grande variété. Dans le cadre de
ce projet nous avons utilisé trois types de drawbots : des
robots sur roues motorisées, ayant un logement prévu pour
recevoir un stylo pour dessiner au sol, une table traçante et
un plotter mural.
La table traçante et le plotter mural ont été exploités en
arts-plastiques. Les élèves ont été amené à dessiner avec
un logiciel de dessin vectoriel un dessin qui a été par la
suite exécuté par ces robots.
Les robots pour dessiner au sol ont été explorés en
technologie et mathématiques. Les collégiens ont conçu
des programmes permettant aux robots d’effectuer
différents motifs et tout en étant en partie contrôlés
à distance par l’utilisateur. Tout le monde ne peut pas
forcément dessiner avec les mains, les robots sont un autre
moyen pour pallier une situation de handicap de manière
créative.
Les élèves se sont rencontrés lors des temps de mise en
commun des avancées techniques et artistiques, avant
chaque vacance. Lors de ces rencontres le projet collectif
permet d’établir un contact entre ces deux groupes.
Les rencontres ont permis aux élèves de découvrir de
nombreux lieux.
Les résultats de cette collaboration ont pris la forme de
plusieurs dessins et fresques.
Compétences travaillées
Collège - Technologie
- Mener une démarche scientifique
- Concevoir des système techniques
- Expliquer un comportement responsable dans le domine de la santé
Collège - Arts-Plastiques
Lien avec le programme du cycle 4 :
- La représentation; images, réalité et fiction
- Production tirant parti des interrelations entre des médiums, des techniques, des processus variés à des fins expressives.
Conception, production et la diffusion de l'oeuvre plastique à l'ère du numérique:
- les incidences du numériques sur la création des images fixes, sur les pratiques plastiques en deux dimensions
- les relations entre intentions artistiques, médiums de la pratique plastique, codes et outils numériques.
Le cadavre exquis, référence aux surréalistes.
Collège - Math
- Mener une démarche scientifique
- Utiliser l'algorithmique et la porgrammation pour créer des applications
Compétences transversales
- Coopérer et réaliser des projets
- Mobiliser les outils numériques
- Exercer son sens critique, faire preuve de réflexion et de discernement
- Respecter les règles de vie collectives
- Prendre des initiatives
Ressources existantes
- Ressources en anglais sur le site du fabricant du robot Move KitroniK
- PDF kitronik Move Motor traduit de l'anglais - Alignement des moteurs File:tutoriel d'alignement des moteurs.pdf
- PDF kitronik Move Motor traduit de l'anglais - Dessin de cercles File:tutoriel dessin de cercles.pdf
- Tutoriels et travaux pratiques

- Exemples de différents types de drawbots :
Equipe encadrante
Collège :
- Professeure d'Arts-Plastiques
- Professeure de Technologie
- Professeure de Math
- Fabmanager
Centre Rey Leroux :
- Enseignante
- Ergothérapeute
Participants
- Classe de 4ème C du Collège De Fontenay, Chartres-de-Bretagne. Classe organisée en sept groupes de quatre élèves, en Arts-Plastiques et en Technologie.
- Deux groupes de 7 élèves (âge collège et âge lycée) de l'IEM Rey Leroux
Matériel nécessaire
Collège :
- 14 cartes Micro:bit
- 14 robots :MOVE MOTOR
- Imprimante 3D
IEM :
- liste de matériel à ajouter
- Imprimante 3D
Commun :
- le Tipibot de l'Edulab Pasteur
- papiers format A0
- Imprimante 3D
Outils nécessaires
- ordinateurs
- site internet : Makecode ou vittascience
- Imprimante 3D
- Charli Robot (fraiseuse numérique)
- Découpe laser (Humanlab ou ENS Rennes)
Coût
Durée estimée
Collège :
- Arts-plastiques : 4 séances d'1 heure
- Technologie : 20 séances de 1 heure
- Math : 10 séance d'1 heure (une semaine sur deux)
Les heures de Math et Technologie étant à suivre, cela fait une séance de deux heures les semaines impaires.
Centre Rey Leroux :
- Ergothérapeute : ?
- Enseignante : ?
Temps forts en commun
- Lancement du projet au collège de Fontenay en décembre
- Test des robots au Humanlab en février
- Réalisation du fond de fresque en avril à l'IEM (attente de validation par la direction)
- Réalisation du dessin de la fresque en juin à l'Edulab Pasteur
Fichiers source
- fichier préparatoire du cadavre exquis : grille avec 12 emplacements (7 dessins de collégiens 5 dessins des jeunes de l'IEM)
Déroulé projet Techno-Math
Séances avant le 5 janvier

- Initiation à la programmation en cours de technologie et de math au collège De Fontenay
- Découverte de la robotique à l'IEM Rey Leroux
- Présentation de MHK et présentation de l'IEM au collège
Séance 1 - Lancement - jeudi 5 janvier 1h30-2h30
Les élèves de l'IEM Rey Leroux arriveront au collège à 14h30 pour repartir à 16h. Les collégiens resteront en cours jusqu'à 17h.
- Les collégiens présenteront le collège aux jeunes de l'IEM (diaporama) puis les jeunes de l'IEM présenteront l'IEM aux collégiens (diaporama)

Présentation du collège

Présentation de l'IEM


- Présentation du sujet : " Nous allons réaliser des fresques avec des robots qui dessinent que nous allons nous-même construire et programmer. Est-ce que vous avez déjà entendu parler de robots qui dessinent ?... Il en existe plusieurs types (vidéo) cette année nous allons travailler autour de deux types de robots : les robots qui dessinent au sol en technologie-math et les robots qui dessinent au mur en arts-plastiques. Ce travail sera en partenariat avec les jeunes de l'IEM. Tout le monde ne peut pas forcément dessiner avec les mains, les robots sont un autre moyen pour pallier une situation de handicap de manière créative."
- Nous présenterons le calendrier :
- jusqu'aux vacances de février nous allons travailler sur les robots en technologie et en Arts-Plastiques (3 séances avant les vacances de février). Un temps fort ets prévu le 9 février pour mettre en commun nos recherches et visiter le humanlab.
- De mars à avril nous améliorerons les robots en technologie, pour faire une deuxième version plus performante. Un temps fort est prévu le jeudi 13 avril pendant lequel nous réaliserons des fresques avec tous les robots. Ce temps serait prévu à l'IEM.
- En mai nous documenterons le projet. Puis le jeudi 25 mai nous irons ensemble visiter l'Edulab Pasteur et réaliser la dernière fresque avec un robot qui dessine au mur.
- Les œuvres et les robots seront exposés dans la salle d'exposition du collège et à l'IEM pendant le mois de juin.
- En cours de technologie nous allons réaliser plusieurs robots qui dessinent au sol. Sept robots seront réalisés en cours de technologie. Chaque îlot va avoir un robot à réaliser. Chaque robot sera différent. Les motifs, les couleurs, les types d'outils, les façons de les commander seront différents. Chaque îlot sera en lien avec un groupe de l'IEM et ce sont les élèves de l'IEM qui seront les commanditaires. Les robots devront s'adapter à leurs envies et surtout à leurs besoins moteurs.
- Nous allons maintenant imaginer les drawbots : les collégiens proposent des cartes avec différents paramètres et les jeunes de l'IEM choisissent un paramètre pour imaginer son robot :
- couleurs : magenta, orange, jaune, vert, cyan, violet, noir, gris
- traces de différents outils : brosse large, brosse moyenne, brosse fine, pinceau, rouleau, écoulement, tampon, tâches, stylo bic, feutre
- motifs : points, ronds, carré, triangles, lignes droites parallèles, lignes droites qui se croisent, lignes droites qui se croisent à angle droit, lignes courbes, forme de haricot (Viallat) symbole de l'infini, rosace, zigzag
- échelle : petit, moyen, grand
- type de commande : tout automatique, le robot avance et les motifs sont exécutés quand on appuie sur un bouton, le robot avance grâce à une télécommande

Couleurs

Traces

Motifs

Echelles

Commandes

Exemple de combinaison possible







- Les différents paramètres sont affichés pour chaque robot, formant des sortes de cahiers des charges graphiques. Les collégiens choisissent le robot sur lequel ils veulent travailler.
- Les groupes formés de collégiens et de jeunes de l'IEM se retrouvent et dessinent à la main le dessin que devra réaliser le robot (en prenant en compte le bon outil, la bonne couleur, le motif à la bonne échelle). Les collégiens demandent aux jeunes de l'IEM comment ils souhaitent contrôler le robot en fonction de leur motricité. Les réponses sont notées dans un document. Les collégiens se serviront ensuite de ces éléments pour concevoir le robot.
- On prend ensuite un goûter ensemble.
- L'heure restante permettra aux collégiens de mettre au propre le cahier des charges du robot et d'imaginer des solutions.
Séance 2 - mardi 24 janvier - 1h
- Début de la programmation. Distribution de fiches pour aider les élèves à organiser leur travail :
- Écrire l’algorithme du motif
- Programmer le motif sur Makecode
- Téléverser et tester avec le robot Maqueen
- Corriger si besoin et améliorer
- Une arène située autour de la feuille permettra de délimiter la fresque dans l’espace. Vous allez utiliser les capteurs ultrason pour détecter les bords. Rajouter à votre programme cette fonction.
- Optimiser votre code avec le bloc Fonction
File:fiches projets elèves.pdf
Séance 3 - jeudi 2 février - 2h
- Poursuite de la programmation du motif et de la détection d'obstacle
- test dans l'arène avec le robot Maqueen sur lequel est attaché un support de feutre
Séance 4 - Visite du HumanLab - jeudi 9 février - 2h
Les élèves du collège et de l'IEM Rey Leroux se retrouvent au humanlab pour un nouveau point d'étape.
- Visite du Humanlab (un groupe toute les 10 minutes)
- Échange autour du résultat avec l'aide du questionnaire :
- Décrivez votre programme et racontez comment vous y êtes arrivés ( les difficultés éventuelles, les améliorations prévues...)
- Montrer le robot en fonctionnement.
- Est-ce le motif qu’on a programmé te convient ?
- Le motif doit-il être plus grand ou plus petit ?
- Échanger sur le motif : combien de fois le robot doit répéter le motif ? (un seule fois, plusieurs fois...), de même taille ou de de tailles différentes ?
- Si votre projet est télécommandé, questionner les jeunes sur leur capacité à utiliser différents types de télécommandes et de boutons (voir les différentes télécommandes et boutons possibles). Faire des essais de préhension
avec les jeunes.
- Goûter
File:QUESTIONNAIRE TEMPS FORT 9 FEV.pdf






Séance 5 - jeudi 2 mars - 2h
Chaque groupe passe au tableau en faisant un point sur où il en est, ce qu'il est ressorti de l'échange avec les jeunes de l'IEM et sur ce qu'il lui reste à faire.
puis en demi-groupe :
- Poursuite de la programmation du motif, de la détection d'obstacle et de la télécommande
- Initiation à Tinkercad
Déroulé projet Arts-Plastiques
Séance 1 - lundi 23 janvier - 1h
Séance 2 - lundi 30 janvier - 1h
Séance 3 - lundi 6 février - 1h
IEM Rey Leroux
- Réalisation de leurs dessins par impression de légumes et vectorisation
- envoie des dessins à la fabmanager
Préparation des formats pour les collégiens

- organisation des dessins sur le format A0
- découpe des dessins pour fournir un format A4 avec un morceau de dessin représenté au format .svg.
Fichier:Cadavre exquis collégiens à donner aux collégiens.zip
Séance 4 - lundi 6 mars - 1h
Les collégiens vont travailler par deux. Les sept formats A4 sont donnés au 14 groupes. Il y aura deux propositions par dessins.
- Réalisation du cadavre exquis
Séance 5 - lundi 13 mars - 1h
- Finalisation du cadavre exquis
Calendrier
Planning cours sur une semaine :
- Centre Rey Leroux : mardi après-midi et jeudi après-midi
- Arts-Plastiques : lundi de 14h55 à 15h55
- Technologie/Math : jeudi de 15h55 à 16h50 semaines paires et de 14h55 à 16h50 les semaines impaires
Intervention de la fabmanager :
- de façon ponctuelle au centre Rey Leroux
- sur les cours de technologie et de math du jeudi à partir du 24 novembre
- sur les quatres cours d'arts-plastiques
- sur les Temps forts
| Collège - Arts-Plastiques | Collège - Technologie et Mathématique | IEM Rey Leroux | ||
|---|---|---|---|---|
| jeudi 17 novembre | Prise en main de la carte Micro:bit |
|||
| jeudi 24 novembre 2h |
Présentation de MHK Programmation avec la carte Micro:Bit |
|||
| Dates à définir avec l'IEM | Présentation de MHK aux jeunes de l'IEM - Annulé pour cause d'organisation interne de l'IEM | |||
| jeudi 1er décembre | Présentations de l'IEM par Patrick | |||
| jeudi 8 décembre 2h |
Programmation des robots sur Micro:bit | |||
| Vacances de Noël | ||||
| jeudi 5 janvier 2h |
Temps fort : lancement du projet au collège De Fontenay. Préparation de la salle de classe (place pour les fauteuils roulants, circulation...) Présentation des deux structures. État de l'art sur les robots qui dessinent Idéation et mise en forme de cahiers des charges | |||
| jeudi 19 janvier 2h |
Programmation des robots sur Micro:bit | |||
| lundi 23 janvier | Initiation à Inkscape | |||
| mardi 24 janvier 1h |
Programmation des robots sur Micro:bit | |||
| lundi 30 janvier | Initiation à Inkscape | |||
| jeudi 2 février 2h |
Programmation des robots sur Micro:bit | |||
| lundi 6 février | Initiation à Inkscape | |||
| jeudi 9 février | Temps Fort Visite du HumanLab Temps de mise en commun des recherches et test des robots ensemble Recul critique pour améliorer les prototypes | |||
| Vacances de février | ||||
| jeudi 2 mars 2h |
Point sur le temps fort du 9 février Amélioration des programmes Découverte de Tinkercad |
Envoie des dessins réalisés par jeunes pour la réalisation du cadavre exquis | ||
| lundi 6 mars | Dessin du cadavre exquis | |||
| jeudi 9 mars 1h |
Amélioration des programmes Découverte de Tinkercad |
|||
| lundi 13 mars | Finalisation du cadavre exquis | |||
| jeudi 16 mars 2h |
||||
| jeudi 23 mars | ||||
| jeudi 30 mars 2h |
||||
| jeudi 6 avril | ||||
| jeudi 13 avril 2h |
Temps Fort Réalisation du fond de fresque avec les robots A l'IEM ? | |||
| Vacances de Paques | ||||
| jeudi 25 mai 2h |
||||
| jeudi 1 juin 1h |
Préparation des robots pour le temps fort à l'Edulab Pasteur | |||
| jeudi 8 juin | Temps Fort Réalisation du dessin de la fresque avec le Tipibot à l'édulab Pasteur Exposition de tous les travaux préparatoires et manipulation des robots | |||
| début juin | Accrochage de l'exposition dans la galerie pédagogique du collège | |||
| 12-23 juin | Exposition de la fresque et des travaux préparatoires au collège | |||
| 26 juin - 6 juillet | Exposition de la fresque et des travaux préparatoires à l'IEM Rey Leroux | |||