Différences entre versions de « Projets:Exosquelette coude »
| Ligne 100 : | Ligne 100 : | ||
On utilise un cable à conducteur blindé de 4 conducteur de 0.22mm2 pour les capteurs de la main. Les connecteurs circulaires ont 5 pôles pour assurer la continuité du blindage. | On utilise un cable à conducteur blindé de 4 conducteur de 0.22mm2 pour les capteurs de la main. Les connecteurs circulaires ont 5 pôles pour assurer la continuité du blindage. | ||
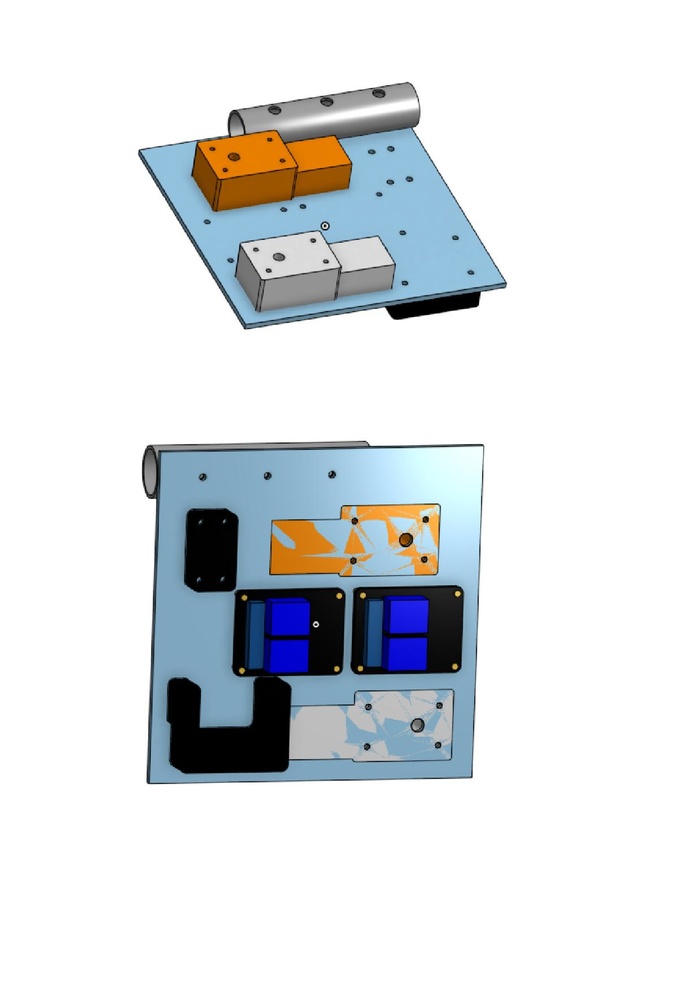
| − | [[File:Principes_cablage_Exo-coude_v2_p4.jpg|400px|thumb|left|Vue de la position des éléments sur la face interne de la plaque supports moteurs]][[File:Principes_cablage_Exo-coude_v2_p5.jpg|400px|thumb| | + | [[File:Principes_cablage_Exo-coude_v2_p4.jpg|400px|thumb|left|Vue de la position des éléments sur la face interne de la plaque supports moteurs]][[File:Principes_cablage_Exo-coude_v2_p5.jpg|400px|thumb|right|Vue de la position des éléments sur la face externe de la plaque supports moteurs]][[File:Principes_cablage_Exo-coude_v2_p6.jpg|400px|thumb|left|Vue de la position des éléments sur la plaque d'alimentation]][[File:Principes_cablage_Exo-coude_photo_face_externe_plaque_moteurs.jpg|400px|right|thumb|Photo de la face externe de la plaque_moteurs]] |
<br clear=all> | <br clear=all> | ||
Version du 6 janvier 2023 à 17:57
| Exosquelette coude
| |
|---|---|
| Informations | |
| Description | Exosquelette de coude permettant de plier le coude afin de soulever la main comamndée par capteur myoélectrique |
| Catégorie | Motricité |
| Etat d'avancement | En cours |
| Techniques | bricolage, électronique |
| Durée de fabrication | |
| Coût matériel | |
| Niveau | |
| Licence | by-sa |
| Date de création | 2020-11-13 |
| Équipe | |
| Porteur de projet | Mathilde |
| Contributeurs | Elektron |
| Fabmanager | Delphine |
| Référent documentation | Delphine, Elektron |
| Nom humanlab | Humanlab_MHK |
| Documentation | |
| Statut de la documentation | Partielle |
| Relecture de la documentation | Non vérifiée |

Description du projet
Création d'un exosquelette de coude permettant de plier le coude afin de soulever la main. Utiliser les capteurs myo électriques pour déclencher le mouvement.
Cahier des charges
- poids du bras 300g coude posé
- déplacer l'exosquelette à l'horizontale et à la verticale
- pouvoir commander le déplacement de l'exosquelette par la personne dans le fauteuil et par son AVS
Synoptique

Analyse de l'existant et liens utiles
Partir de cet outil pédagogique https://www.eduexo.com/eduexo-kit/ pour en faire un exosquelette utilisable
Une documentation du projet en cours mais non finalisé a été réalisé lors du Fabrikarium en Octobre 2022, et est visible sur cette autre page
La documentation du prototype fonctionnel finalisé est sur cette page. Les développements antérieurs au Fabrikarium figurent sur l'onglet "Journal de bord" de cette page.
Equipe (Porteur de projet et contributeurs)
- Porteurs du projet : Mathilde
- Concepteurs/contributeurs : Christian, Michel, David E, David N
- Animateur (coordinateur du projet) : Mathilde
- Fabmanager référent :Delphine
- Responsable de documentation : Mathilde, Delphine
Matériel nécessaire
Outils nécessaires
Coût
Délai estimé
Fichiers source
Télécharger l'ensemble des STL à imprimer
Etapes de fabrication pas à pas
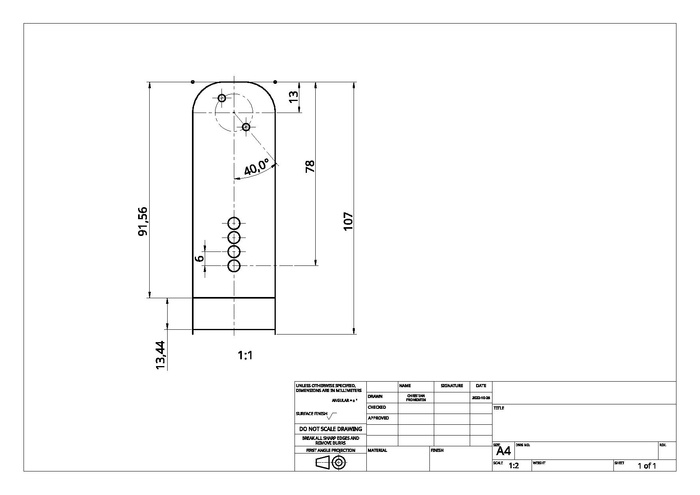
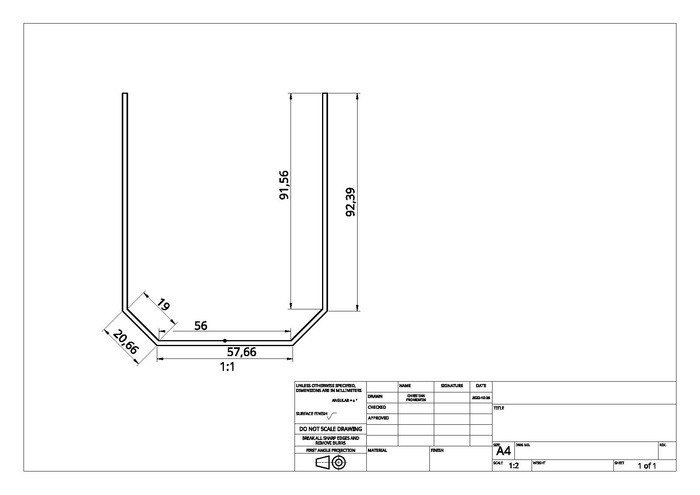
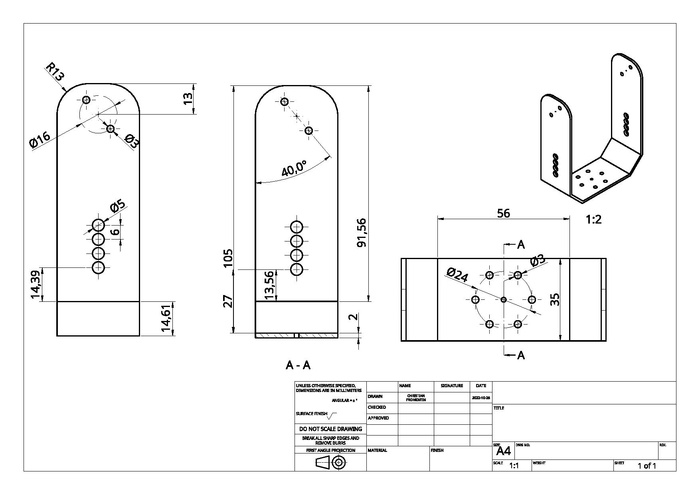
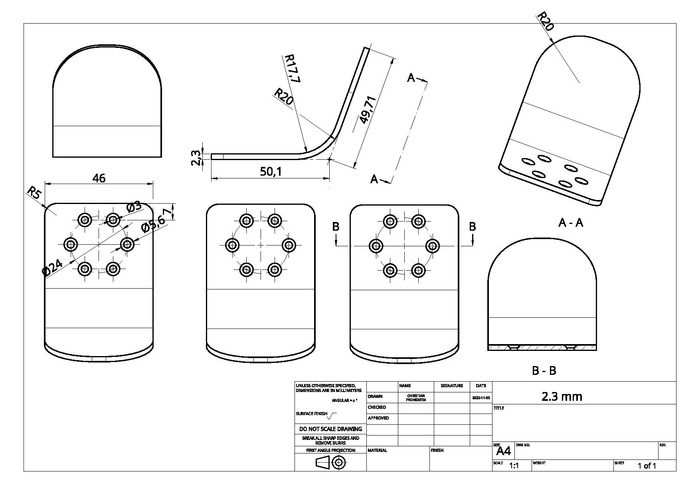
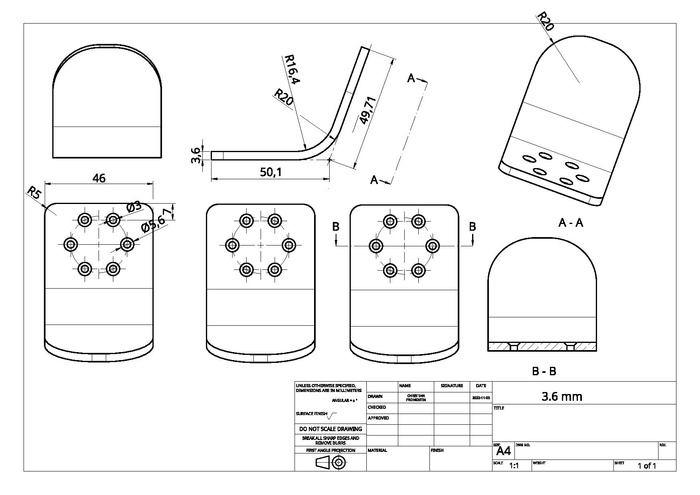
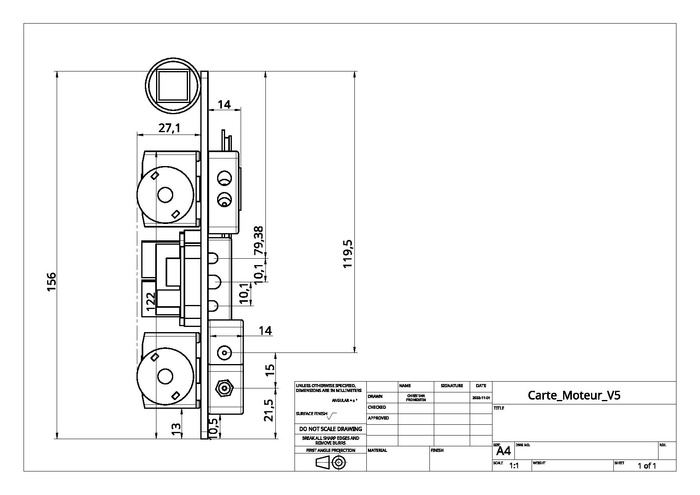
Assemblage mécanique
Avec la plaque d'aluminium procéder au découpage et pliage de manière à répondre aux côtes suivantes
Circuit électronique
Les deux circuits rassemblant l'électronique sont posés sur deux plaques de dibons.
Principe du câblage


Le câble d'alimentation est déjà en place, on ne le change pas.
La fiche est une XT30, jaune, pas très sécure, on la change par un couple M/F, étanche et circulaire 2 pôles avec détrompeur. On alimente la carte moteur par un câble de 8 conducteurs de 0.22mm2. Cela peut paraître de section faible mais un câble de 0.22mm2 peut supporter 2A et le courant d'un moteur n'est jamais plus de 200mA. Le câble est blindé.
Les connecteurs ont 9 pôles pour assurer la continuité du blindage.
La répartition des tension est la suivante :
- 2 conducteurs pour le 5v
- 2 conducteurs pour le 24v moteur1
- 2 conducteurs pour le 24v moteur2
- 2 fils de contrôle des convertisseurs 24 vers 0 à 30v (On a besoin de ces deux fils pour couper l'alimentation des convertisseurs afin de réduire la consommation lorsqu'il n'y a pas d'activité.)
On utilise un câble à conducteur blindé de 4 conducteur de 0.22mm2 pour la réuprérations des informations des boutons poussoir pour le contrôle des moteurs par l'assitante.
On utilise un cable à conducteur blindé de 4 conducteur de 0.22mm2 pour les capteurs de la main. Les connecteurs circulaires ont 5 pôles pour assurer la continuité du blindage.




Plaques de dibons à préparer
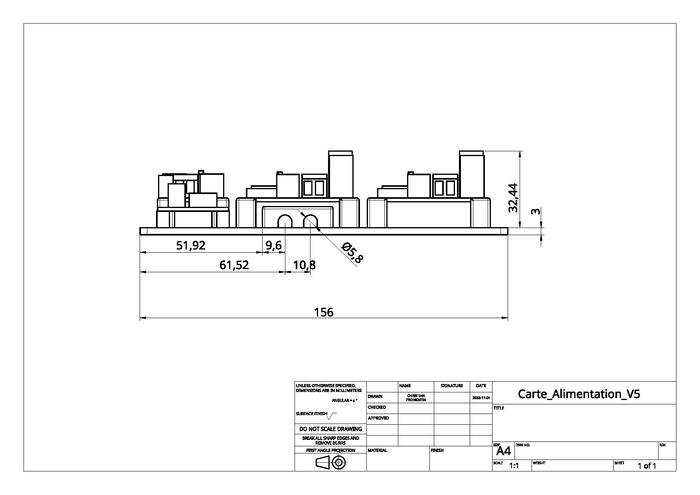
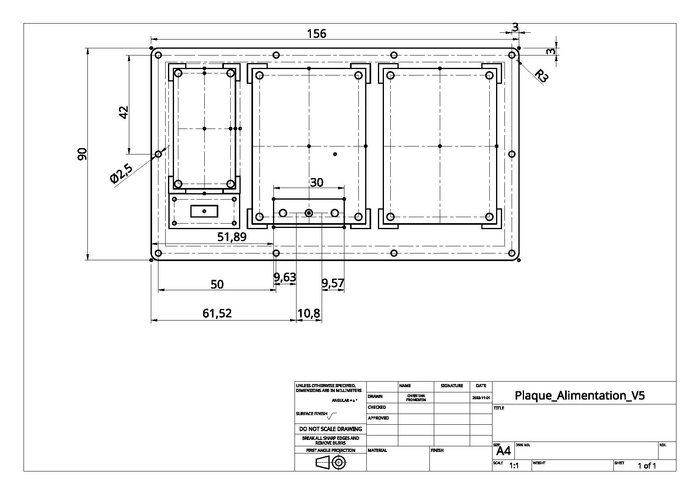
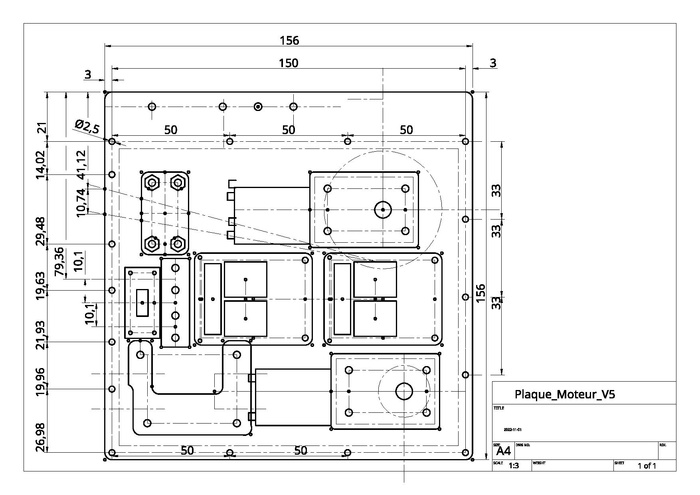
- Découper une plaque de dibon de 156 X 90 mm pour le circuit de l'alimentation. Se référer aux schémas ci-dessous pour faire les trous aux emplacements appropriés.
- Découper une plaque de dibon de 156 X 156 mm pour le circuit des moteurs. Se référer aux schémas ci-dessous pour faire les trous aux emplacements appropriés.
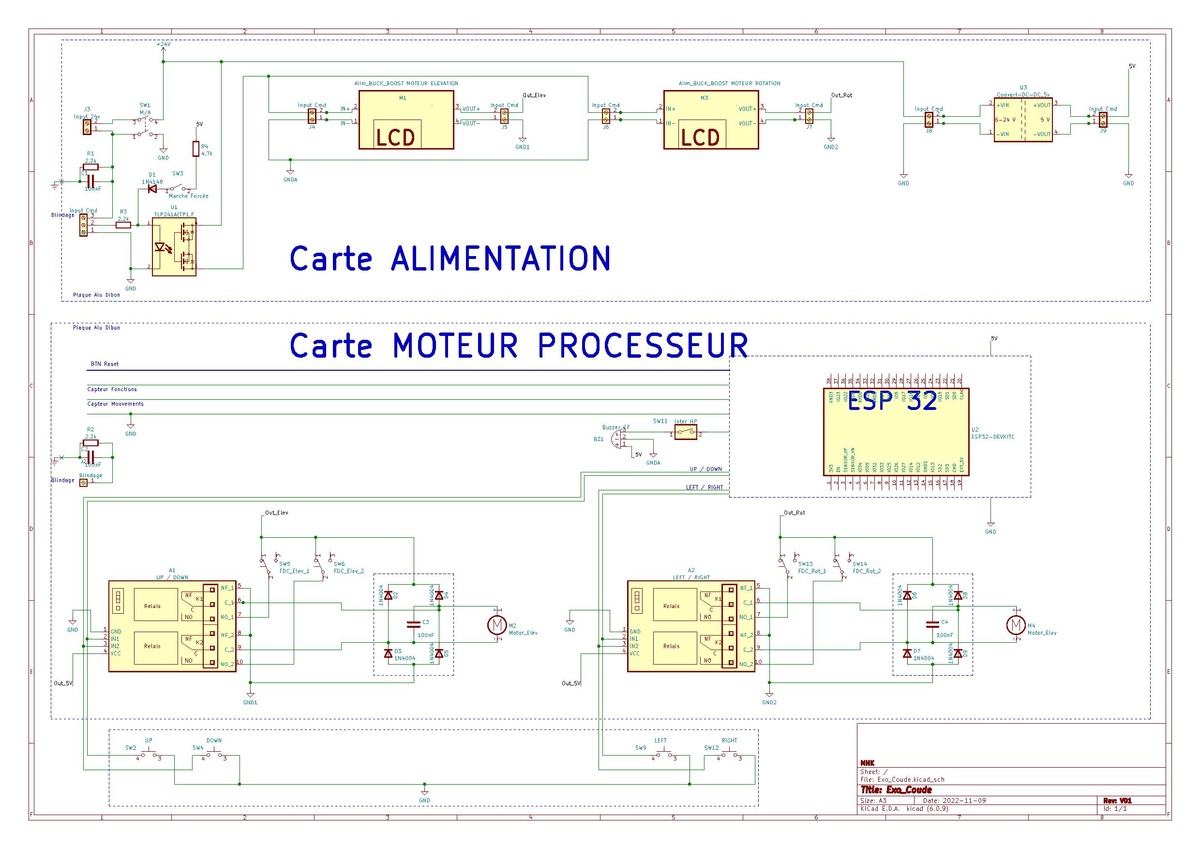
Schémas électroniques de la carte moteur et la carte alimentation
Assemblage des éléments sur les deux plaques (alimentation et moteurs)
Plaque moteurs


Plaque alimentation

