Différences entre versions de « Projets:Exosquelette coude »
De wikilab
| Ligne 81 : | Ligne 81 : | ||
[[File:Carte_Alim_Face_V5.pdf|Schéma de la carte alimentation profil|700px|thumb|gauche]] | [[File:Carte_Alim_Face_V5.pdf|Schéma de la carte alimentation profil|700px|thumb|gauche]] | ||
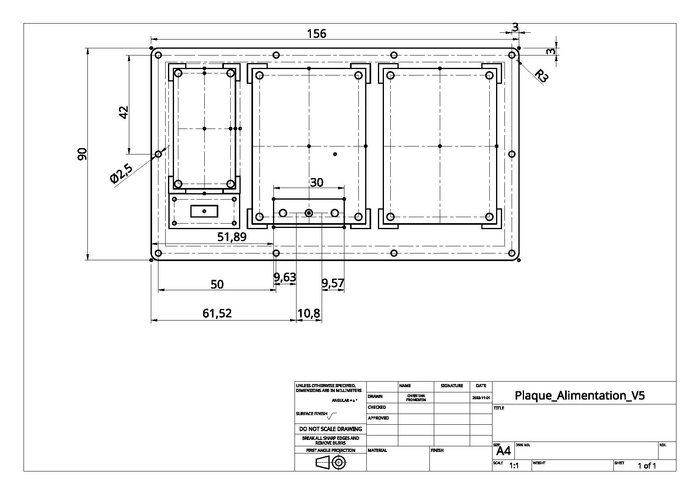
| − | [[File:Plaque_Alim_V5.pdf|Schéma de la carte alimentation | + | [[File:Plaque_Alim_V5.pdf|Schéma de la carte alimentation vue du dessus|700px|thumb|gauche]] |
| + | <br clear=all> | ||
| − | * Découper une plaque de dibon de 156 X | + | * Découper une plaque de dibon de 156 X 156 mm pour le circuit des moteurs. Se référer aux schémas ci-dessous pour faire les trous aux emplacements appropriés. |
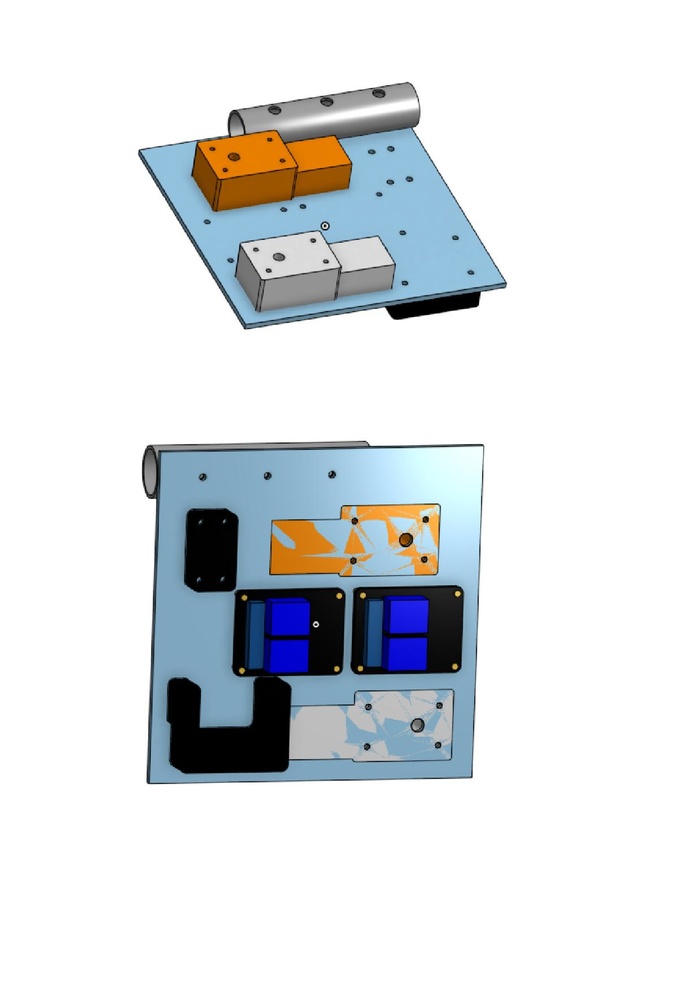
[[File:AssemblagePlaque_V5.pdf|thumb|700px|Assemblage de la plaque moteur|gauche]] | [[File:AssemblagePlaque_V5.pdf|thumb|700px|Assemblage de la plaque moteur|gauche]] | ||
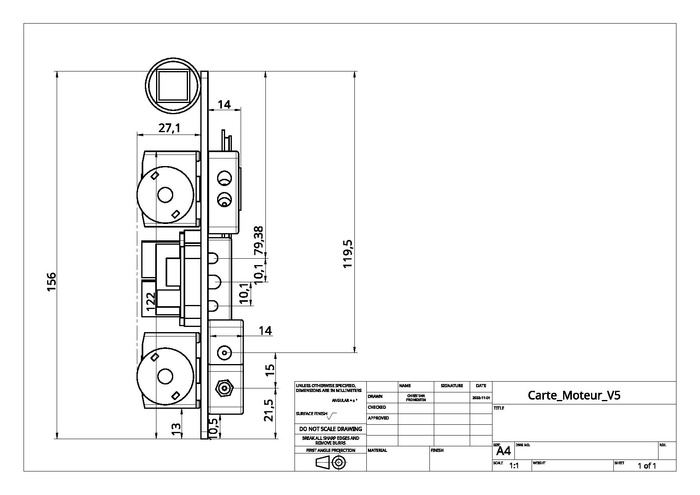
| − | [[File:Carte_Moteur_Gauche_V5.pdf|thumb|700px|Carte moteur|gauche]] | + | [[File:Carte_Moteur_Gauche_V5.pdf|thumb|700px|Carte moteur vue de gauche|gauche]] |
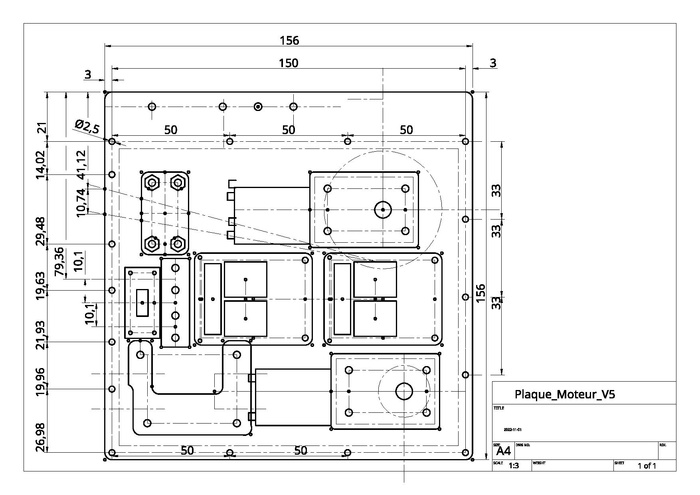
| − | [[File:Plaque_Moteur_V5.pdf|thumb|700px|Plaque moteur|gauche]] | + | [[File:Plaque_Moteur_V5.pdf|thumb|700px|Plaque moteur vue du dessus|gauche]] |
<br clear=all> | <br clear=all> | ||
Version du 6 janvier 2023 à 15:14
| Exosquelette coude
| |
|---|---|
| Informations | |
| Description | Exosquelette de coude permettant de plier le coude afin de soulever la main comamndée par capteur myoélectrique |
| Catégorie | Motricité |
| Etat d'avancement | En cours |
| Techniques | bricolage, électronique |
| Durée de fabrication | |
| Coût matériel | |
| Niveau | |
| Licence | by-sa |
| Date de création | 2020-11-13 |
| Équipe | |
| Porteur de projet | Mathilde |
| Contributeurs | Elektron |
| Fabmanager | Delphine |
| Référent documentation | Delphine, Elektron |
| Nom humanlab | Humanlab_MHK |
| Documentation | |
| Statut de la documentation | Partielle |
| Relecture de la documentation | Non vérifiée |

Description du projet
Création d'un exosquelette de coude permettant de plier le coude afin de soulever la main. Utiliser les capteurs myo électriques pour déclencher le mouvement.
Cahier des charges
- poids du bras 300g coude posé
- déplacer l'exosquelette à l'horizontale et à la verticale
- pouvoir commander le déplacement de l'exosquelette par la personne dans le fauteuil et par son AVS
Synoptique

Analyse de l'existant
Partir de cet outil pédagogique https://www.eduexo.com/eduexo-kit/ pour en faire un exosquelette utilisable
Equipe (Porteur de projet et contributeurs)
- Porteurs du projet : Mathilde
- Concepteurs/contributeurs : Christian, Michel, David E, David N
- Animateur (coordinateur du projet) : Mathilde
- Fabmanager référent :Delphine
- Responsable de documentation : Mathilde, Delphine
Matériel nécessaire
Outils nécessaires
Coût
Délai estimé
Fichiers source
Télécharger l'ensemble des STL à imprimer
Etapes de fabrication pas à pas
Assemblage mécanique
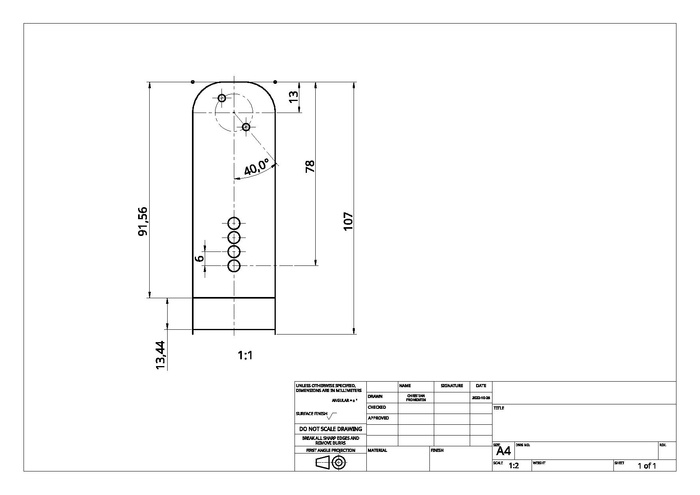
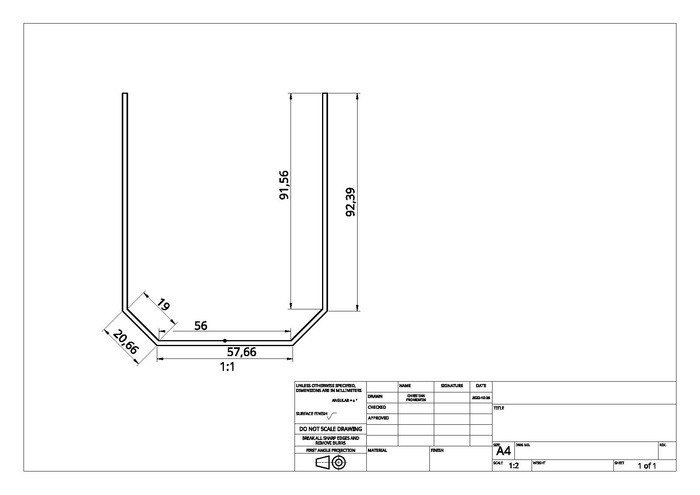
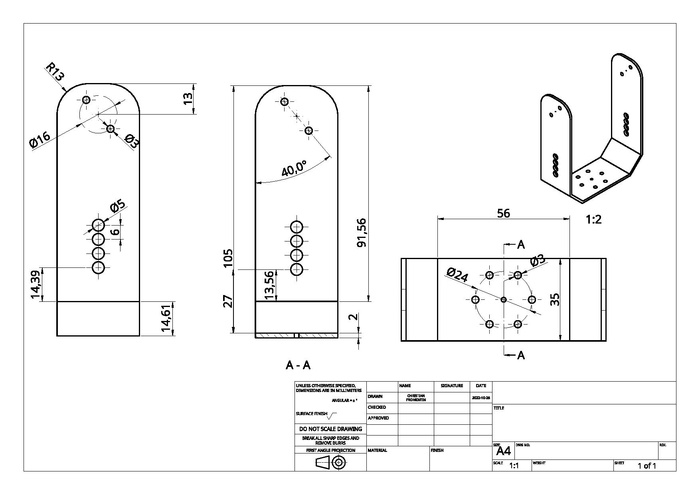
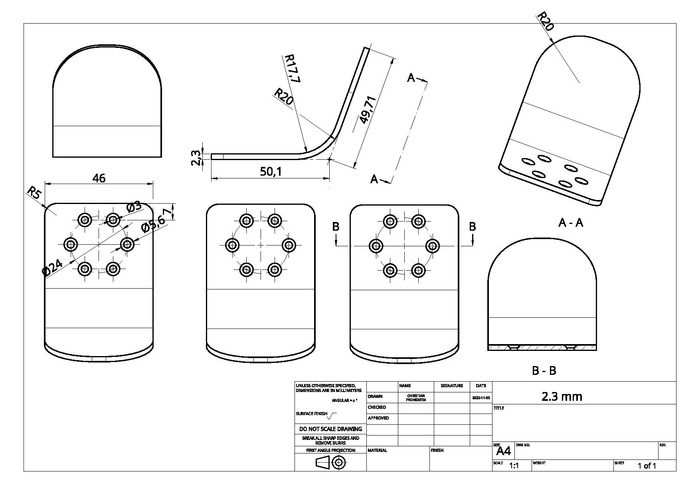
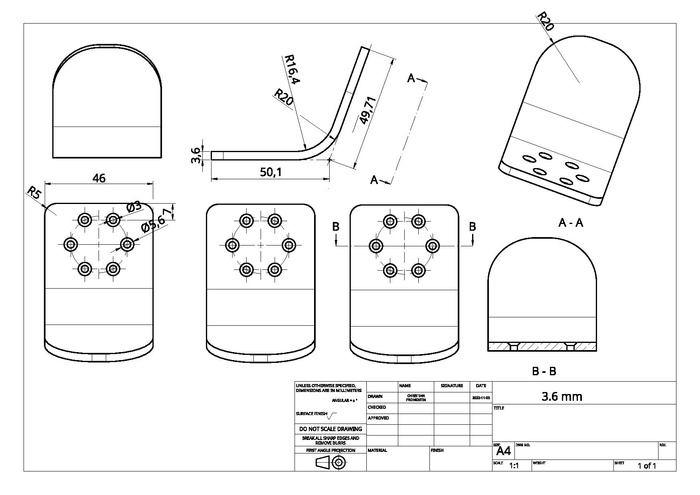
Avec la plaque d'aluminium procéder au découpage et pliage de manière à répondre aux côtes suivantes
Circuit électronique
Les deux circuits rassemblant l'électronique sont posés sur deux plaques de dibons.
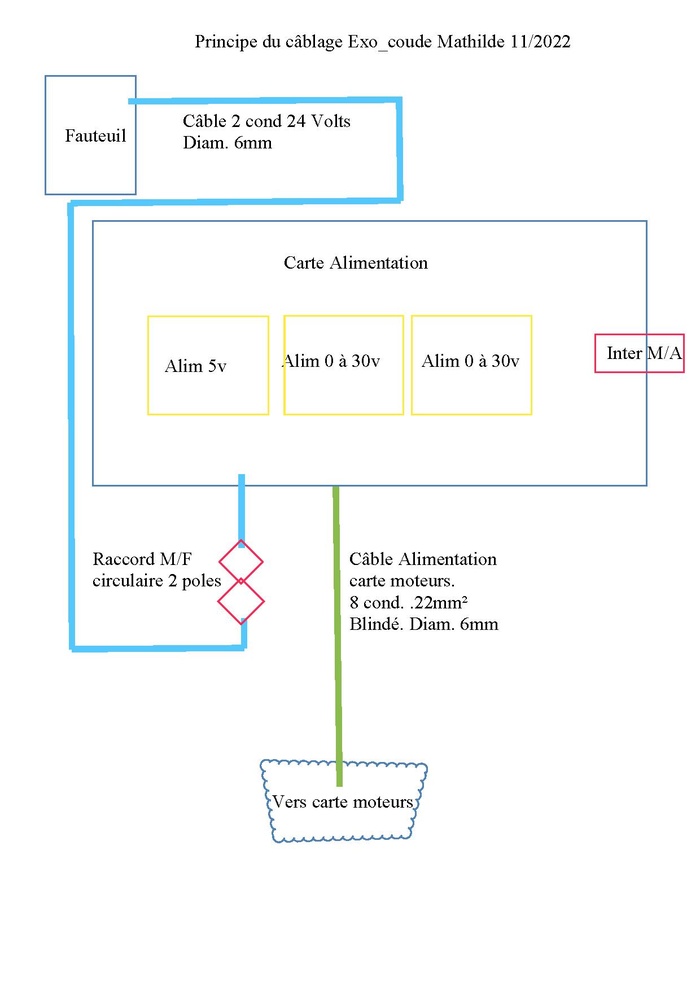
Principe du cablage
Plaques de dibons à préparer
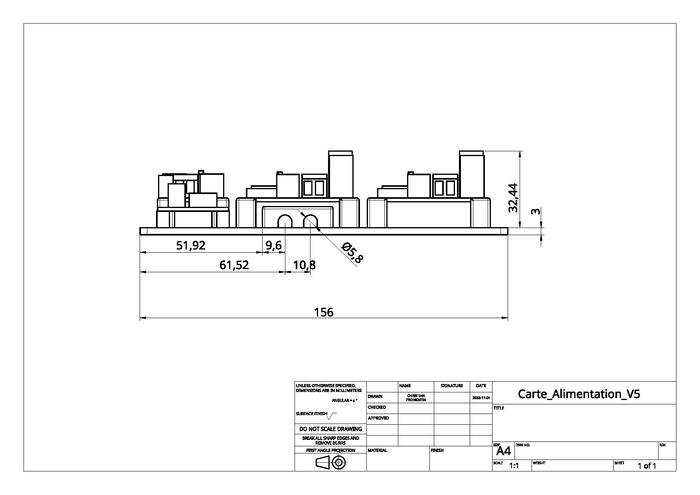
- Découper une plaque de dibon de 156 X 90 mm pour le circuit de l'alimentation. Se référer aux schémas ci-dessous pour faire les trous aux emplacements appropriés.
- Découper une plaque de dibon de 156 X 156 mm pour le circuit des moteurs. Se référer aux schémas ci-dessous pour faire les trous aux emplacements appropriés.
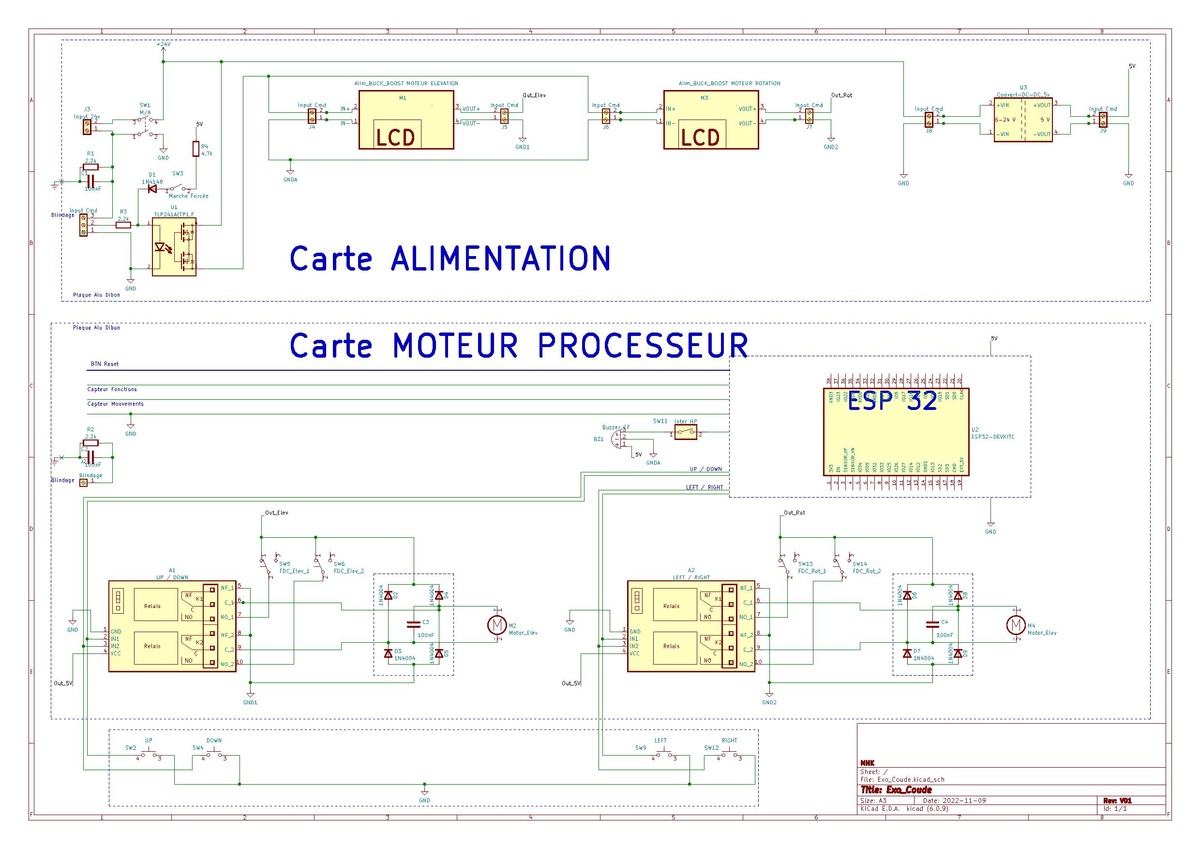
Schémas électroniques de la carte moteur et la carte alimentation