Différences entre versions de « Projets talk:Poche mètre »
| Ligne 652 : | Ligne 652 : | ||
</gallery> | </gallery> | ||
<br clear=all> | <br clear=all> | ||
| + | |||
| + | |||
| + | ==Michel :15/09/2024 :Qui n'avance pas recule== | ||
| + | J’ai mis au point ceci : | ||
| + | |||
| + | Ça marche mais il faut minimum 3,7 à 4 volts pour bien faire fonctionner le thyristor… Désolé. | ||
| + | |||
| + | |||
| + | Ce schéma met le circuit sous tension quand la poche est pleine par le FSR comme j’ai cru comprendre, et reste en fonctionnement jusqu’à ce que tu appuie sur le poussoir d’interrogation de volume. | ||
| + | |||
| + | Pour l’instant je ne suis pas parvenu à traduire tes volontés en schéma électrique en ce qui concerne le ”clignotement” du vibreur sans créer un circuit auxiliaire commandé par le FSR et l’horizontalité. | ||
| + | |||
| + | Le système se complexifierait, du coup. | ||
| + | |||
| + | Il faudrait bien m’écrire une sorte de cahier des charges, pour éviter que je ne dérive. | ||
| + | |||
| + | P.S: Voici une pile 3,7 volts au Li-Ion, (18350) mais ne trouve pas de support :-( | ||
Version du 26 septembre 2024 à 08:46
Prototype avec capteurs FSR
Michel : 28/05/2024 : Synthèse du cahier des charges et première piste technique
Pour résumer notre échange David: Tu veux être renseigné sur le volume contenant une poche à urine après une interrogation faite au système, la réponse est donnée visuellement par défaut et occasionnellement de manière audible et haptique.
Si la poche est pleine le signal est donné même si tu ne l’interroge pas, ce signal est sonore et haptique (*).
Nous aurons quatre bandes FSR de 10 cm placées en croix sur les boutons qui fixent la poche à ton mollet.
La carte électronique serait la plus souple possible et placé sur la poche.
Ce que je dois faire avant tout:
- Simuler le comportement des quatre bandes FSR sur un faux mollet dans les deux positions.
- Mesurer la résistance de chaque bande avec un volume de liquide connu et ce dans deux positions; horizontale et verticale.
- Je te donnerais deux tableaux de valeurs volume —> résistance à plat et le deuxième vertical.
- Le schéma de principe.
Je compte sur toi pour l’analyse des résultats de mesure et le code à venir si nécessaire.
(*)Nous avons évoqué ensemble la possibilité de déclencher l’alarme ”poche pleine” de manière indépendante à l' interrogation manuelle que tu feras.
Pour cela je vois un thyristor ou deux transistors tête bêche, le FSR de ”trop plein” et les quatre autre, titille la gâchette du thyristor celui ci conduit et alimente le système pour la confirmation de poche pleine.
Mais attention il faudra ”réarmer” le thyristor après remplacement ou vidage de la poche car le système sera alimenté et le restera.
Michel : 05/06/2024 : fabrication d'un faux mollet pour y tester le prototype
Quelques photos de du faux mollet réalisé à partir d’un tube de gouttière de Yves, qui simulera la déformation de la poche, verticalement et horizontalement. J’essaye d’être le plus proche possible de la configuration réelle. Les capteurs en bandes (4) sont vivement attendus et devraient arriver vendredi. Ils seront fixés sur une bande élastique maintenue par les 4 boutons et en diagonale puis parallèle à l’axe longitudinal du faux mollet. Je réaliserai plusieurs mesures, poche verticale, horizontale, bandes élastiques en diagonales ou verticales et ce pour différents volumes.






Michel: 17/06/2024 : Synoptique Poche mètre
J’ai dessiné ceci :
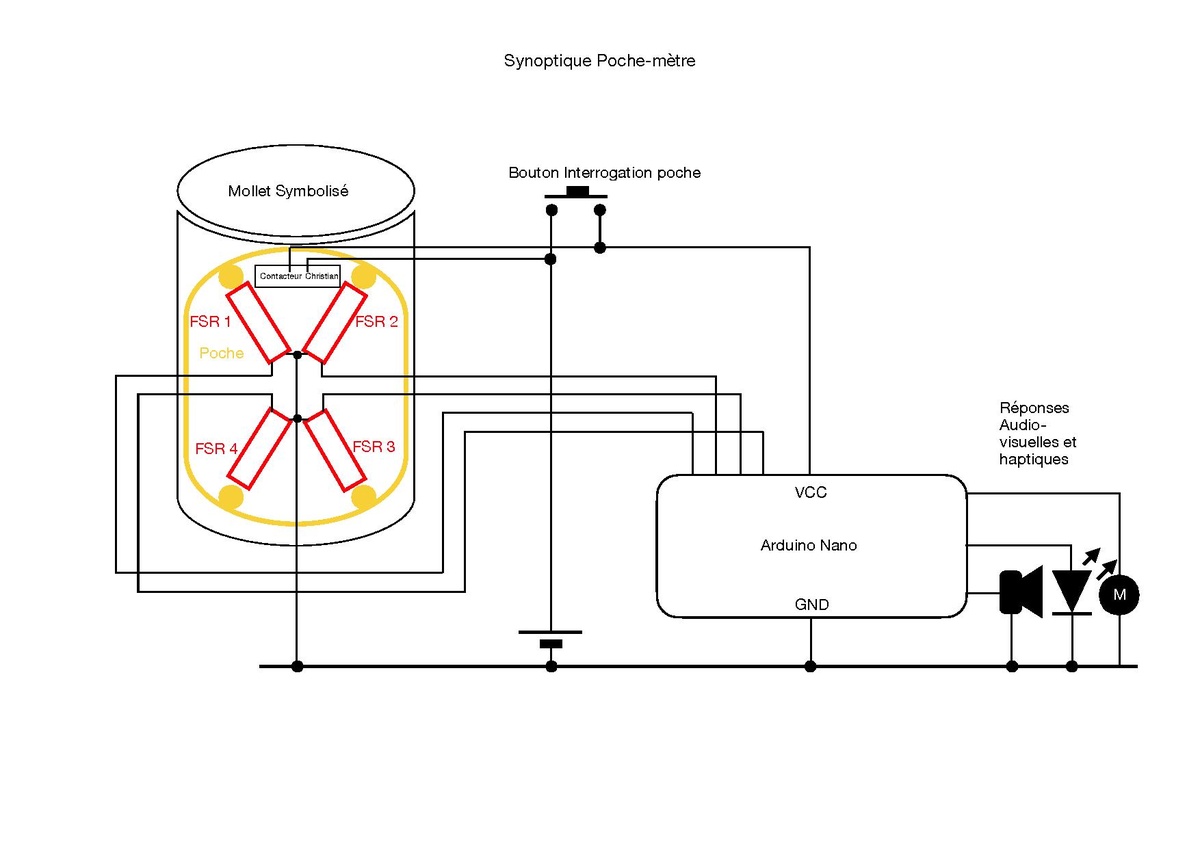
Actuellement, la poche est fixée au mollet par le jeu de deux bandes élastiques velcro sur lesquelles sont cousus des boutons, deux en haut deux en bas, nous profiterons de ces quatre boutons déjà en places (rond jaune sur le dessin).
Deux des quatre FSR sont glissés dans une espèce de doublure cousue sur une bande élastique. Aux deux extrémités de cette bande élastique une boutonnière recevant les boutons qui fixent aussi la poche sur le mollet (je n’ai pas dessiné les bandes élastiques pour ne pas surcharger le dessin).
Il y aurait donc deux bandes élastiques à se croiser en une espèce de diagonale (voir si 4 capteurs seront utiles je vous explique plus loin pourquoi j’en vois 4).
En haut de la poche à l’horizontale le contacteur ultra souple made in Christian F. Servira de contact prioritaire « poche pleine ». Et est aussi sur une bande élastique sur les deux boutons du haut. Ce contacteur est juste en parallèle du bouton que David poussera pour interroger l’état de sa poche.
Ce contacteur sera efficace en position verticale de David, lorsque David sera allongé, j’émets des doutes.
David souhaite vraiment que l’électronique ne soit pas en veille électrique.
Les réponses données pas l’arduino, à l’interrogation par le bouton, seront audiovisuelles selon un protocole que David nous donnera et si on peut haptique, lié au volume de la poche.
Pourquoi 4 capteurs FSR?
Simplement que je me suis mis en tête que les mesures de résistances faites indépendamment sur les quatre capteurs ne seront pas « répétables » puisqu’elle sont liées à la forme de la poche elle même souple, Mais...
...Mais que si j’arrive par une succession de mesures faites sous forme de tableaux sur différents volumes et position (donc de formes de poches), je pourrais peut-être trouver une « tendance », et que cette tendance serait plus affinées si j’avais 4 capteurs au lieu de deux.
Michel: 07/07/2024
Voici la confection des bandes élastique à boutonnière + glissière pour les capteurs FSR, terminées par ma grande soeur dévouée. Regarder ceci :

Les capteurs FSR sont glissés entre la bande élastique noire à boutonnière et celle qui est rose elle aussi élastique… Génial, c’est ce que je souhaitais. Donc en théorie ces FSR vont être soumis à déformations par le gonflement de la poche depuis leurs points d’arrimages; les boutons qui maintiennent la poche sur le mollet de David. J’attends, courant de semaine prochaine, la livraison de ces bandes élastiques . Puis je procède aux mesures des résistances de chaque capteur FSR pour chaque volume, et ce en croisant les doigts sur les résultats…
David: 07/07/2024 : Piste de méthodologie pour la prise de mesures
Michel, je rebondis sur ta phrase
Puis je procède aux mesures des résistances de chaque capteur FSR pour chaque volume, et ce en croisant les doigts sur les résultats…
Donc pour moi il faut réaliser deux dataset , un en position assise l'autre allongée.
On câble sur 4 entrées analogique d’Arduino et on envoie les valeurs du ADC sur le port de com.
On mesure les valeurs pour un volume donné, puis on ajoute 20cc et (un click) on recommence de 0 à 500 (x25).
Une idée.
Michel: 07/07/2024 : Méthodologie pour tester le prototype
Les mesures seront faites sur chaque volume sur chaque FSR et sur les deux positions. Horizontale et verticale.
Je comptais faire des mesures de résistances. Voir s’il y a répétabilité dans les résultats.
Je remplis la poche par partie de volume.
Je fais toutes mes mesures jusqu’au remplissage complet.
Je vide la poche.
Je recommence.
Je fais une moyenne des résultats obtenus pour chaque volume et chaque position.
Je regarde quel mini et quel maxi j’ai obtenu pour chaque volume et chaque position. Afin d’encadrer le seuil qui donnera le volume.
S’il n’y a pas de répétabilités dans tous mes résultats ni de tendances alors je serais dans l’impasse.
Michel: 11/07/2024
Ma Soeur Brigitte m’a apporté à l’instant son travail, je me suis empressé de les placer sur la maquette. Les cotes sont nickels.
Voici une photo:

Avant de faire les mesures avec capteurs FSR en place, j’ai consolidé ces derniers à la colle époxy haute température le rivetage des pin’s de sorties sur la bande elle même, car je vais souder les pin’s et avant de faire des dégâts par soudage j’ai préféré assurer :-)

Michel : 29/08/2024 : Synoptique poche-mètre
Comme mes essais, par collage des trois capteurs sur le coté doux de la poche (celui en contact avec la jambe) n’a pas fonctionné après remplissage complet, Yves et moi avons réalisé, sur ma jambe dans les deux position horizontale et verticale, de nouvelles déterminations des niveaux pour le placement plus précis des YO-F07 (je me suis d’ailleurs rendu compte tard, que j’aurais pu commencer ainsi :-(, plutôt que de faire une maquette).
Nous avons une courbe. J’avais une droite, nous pensons Yves et moi que les capteurs doivent épouser la poche et son gonflement par le placement autour de la poche d’une sorte de ”chaussette” en tissus ultra souple (genre jersey) et élastique sur laquelle sera cousu les capteurs et ainsi seront plaqués sur la poche, MAIS :
Cela sous entends que toi ou les personnes qui t’aident à placer cette poche, soient en mesure d’enfiler cette ”chaussette” autour de la poche avant la fixation sur ta jambe par les 4 boutons.
De plus un matelas en molleton d’au moins 5 mm d’épaisseur, sera intercalé entre ta jambe et cet ensemble, il n’y aura, si j’ai bien compris la construction cousue par Yves, une seule pièce (”chaussette et molleton”), Yves rectifiera si nécessaire.
Michel: 14/07/2024 :
J’ai commandé une carte Arduino Micro pour pouvoir faire nos essais.
J’ai câblé et mis en place dans leurs bandes élastique, les 4 FSR, Ils sont tous opérationnels après mes manipulations faites sur eux. Ouf !
Je commencerai les mesures purement physique (résistances par volume d’eau) semaine prochaine .
Cela donne ça :

J’ai dû immobiliser les 4 FSR dans leurs poches élastiques à glissière à l’aide d’une goutte de colle à chaud sur la bande élastique. Elles resteront immobiles, mais pourrons être décollées si besoins.
J’attends la carte Arduino pour charger le programme d’essai.
Michel: 17/07/2024: premières mesures
J’ai reçu hier soir la carte Arduino Micro, ai entré le code à David, ai pu voir en moniteur série que les FSR étaient bien actifs, mais: J’ai procédé en fin de matinée et en début d’après midi à des essais de remplissage de la poche.
Les capteurs FSR ne réagissent qu’a partir de 400 mL :-(.
Il sont ”aveugles" de 0 à 400 mL donc.
- Je vais me rallier à l’idée de Christian, car les quatre bandes élastiques se gênent alors que je croyais qu’elles augmenteraient la possibilité de ”répondre” aux déformations, aussi, ces bandes élastiques manque de souplesses… - je vais mettre deux FSR par bandes élastiques à boutonnières et les câbler en parallèle… Juste pour voir si c’est mieux en sensibilité.
J’ai un autre souci:
Quand la poche se remplit les bandes velcro à boutons qui maintiennent la poche, glissent sur ma maquette et se rapprochent (la bande haute se rapproche de la basse) du coup le capteur FSR ne répond plus lorsque la poche est déformée et qu’elle à fait bouger les deux bandes velcro à boutons.
David, si je te vois jeudi, pourrais-je examiner la poche de ta jambe pour vérifier que mon problème de maquette n’est lié qu’a ma maquette?
Michel 23/07/2024 : Deuxièmes mesures
Aux essais avec Yves tout à l’heure, nous avons eu des réponses de nos capteurs FSR un peu plus évidentes que précédemment..
Après que nous nous soyons rendu compte que les capteurs FSR ne répondaient pas très bien sauf à partir de 400 ml, semaine dernière, j’ai décidé d’en mettre deux en parallèle sur chaque demi bande élastique soit quatre en tout de cette manière :

Les réponses sont plus franches, et varient en fonction des volumes de liquide.
Cependant les deux capteurs mesurant le bas de la poche ne retombent pas toujours à zéro sur poche vide, je pense qu’il s’agit du fait qu’il sont soumis à une torsion plus évidente au repos que les deux du haut (peut-être que ma maquette n’est pas top).
En tout cas j’ai des réponses différentes pour chaque volume.
Ce qui me tracasse, c’est que les capteurs FSR (des résistances variables) sont vites en ”saturation”, les valeurs du moniteur série Arduino restent figées à environ 560 sur déformation quant les FSR sont alimentés sous 3,3 volts.
Demain je tente deux choses:
Je diminue les Pull-down à 5 Kohm pour me rapprocher du zéro volts, je retourne les bandes élastiques de cette manière pour diminuer l’épaisseur de contact entre poche et FSR.
David : 24/07/2024, Proposition d'un nouveau type de capteur
Sur les conseils de Yves, je regarde les « Liquide Détecteurs de niveau Numériques ».
Quatre SEN0508, <100 ml, <200, <300,>400 en diagonale sur support souple sous la poche.
Cela me semble mieux.

Michel :24/07/2024
Cela à l’air pas mal du tout!
Du coup je fais quoi? J’abandonne les FSR, il me reste un essai à faire avec la bande élastique sous la poche…
Redis moi.
Yves: 24/07/2024
Je ferai malgré tout l’essai avec les capteurs FSR sous la poche pour voir si cela change quelque chose. Il ne faut pas abandonner si vite même si je pense qu’on aura des résultats plus fidèles avec des capteurs de niveau. 😉
Tu pourrais aussi faire un essai avec les FSR posés en parallèle, horizontalement sur la poche et fixes avec un double face pour voir si cela donne de meilleures mesures. Si c’est le cas on pourra ensuite chercher comment les positionner ainsi de façon facile et pratique.
Michel: 24/07/2024
J’ai fais deux types de mesures tout à l’heure. L’une avec les bandes élastiques sur la poche et les FSR vers l’intérieur (en contact avec la poche), de cette manière:

Ce n’est pas probant.
Puis j’ai placé les bandes élastiques sous la poche les FSR en contact avec la poche, de cette manière :

C’est beaucoup mieux mais les FSR du bas sont vites en butée (ce qui est logique puisque la poche gonfle depuis le bas. Dès 300 mL nous avons les FSR du Haut qui répondent bien et ce jusqu’a 400 mL (je n’ai d’ailleurs pas réussi à remplir plus de 400 mL quelque soit la position des bandes élastiques (la poche est peut-être trop tendue sur cette maquette).
Conclusion pour ce qui me concerne.
Les bandes élastiques ne sont pas assez souples (je m’en remets à Yves pour changer de ”technologie” de tissu souple) J’ai trop gagné en sensibilité en branchant électriquement les FSR en parallèle. (Je dois voir cela de plus près avec Christian). Mes fils de connections sont trop rigides et altèrent le zéro au repos des FSR (dès que l’on tire sur les fils les FSR répondent).
Michel: 26/07 2024: Difficultés avec les FSR
Devant les difficultés que je rencontre avec la technologie FSR et la rigidité des bandes élastique que j’ai fais faire par ma frangine, nous avons décidé ceci avec Yves et David:
De tenter une dernière fois avec les FSR collés sur une poche sacrifiée qui servira de ”plastron” et qui sera placée sous la poche de David in situ. Si mes résultats sont peu probants ont se ralliera à des produits finis manufacturés de chez DigiKey SEN0508
Michel : 01/08/2024
J’ai reçu mon fil de câblage souple hier après-midi et ai procédé au soudage de ces derniers sur les FSR ce matin à la fraîche. J’ai collé les FSR sur une poche d’essai. Dès que mon labo retrouve des températures clémentes pour gamberger convenablement alors j’appelle Yves et place aux mesures et essais. Si les résultats se révélaient médiocres alors nous ferons appel aux capteurs capacitifs de niveaux trouvés par David. Ce seront donc les dernières mesures sur FSR…
Michel : 03/08/2024
Avec Yves cette après midi nous avons effectué trois essais avec les FSR à bande.
Le premier: les FSR sont placés horizontalement sur une poche, à 100 ml, 200 ml, 300 ml et 400 ml de cette manière :

Juste pour voir si nous obtenons des résultats, plus le volume augmente moins nous obtenons de réponses...
Deuxième essai :On décide de retourner la poche de 180 degrés de cette manière :
Nous avons des résultats uniquement sur le FSR de 100 ml et sur les autres seulement à partir de 300 ml les valeurs sont identiques sur les trois FSR (200, 300 et 400 ml)
Au troisième essai on décide de couper la poche munie des FSR pour la placer derrière la poche utile on ôte le système remplissage et de vidage de manière a obtenir une poche plate sans relief, puis devant se trouve la poche utile, de cette manière :

Là nous avons bien des résultats sur les quatre FSR, suivant les différents volumes, mais il sera difficile de les interpréter; par exemple le FSR du bas (celui des 100 ml) sa résistance diminue bien quand le volume augmente, mais se met à augmenter à partir de 300 ml pour reprendre sa valeur de départ quand la poche est pleine…
Conclusion:
L'utilisation des FSR tels que ceux que nous avions, nécessite qu’il ”travaillent" en pression et non en flexion.
Si nous voulons interpréter les résultats de manière facile il faudra supprimer le FSR des 100 ml les trois autres donnent des valeurs cohérentes tels qu’ils étaient placés.
Doit-on abandonner ce principe ou se cantonner à moins de capteurs? deux par exemple (200 ml et 400 ml)
David: 03/08/2024, Proposition de tester les capteur de détection de niveau de liquide
Je testerais bien volontiers trois : Non-contact Flexible Liquid Level Sensor SEN0508 à 100 250 400 ml,en légère diagonale en 3v (2x1,5).
https://www.dfrobot.com/product-2463.html
Michel: 05/08/2024
Oui on peut tester trois capteurs mais deux suffiraient amplement, placés judicieusement de manière à distinguer à la fois le volume et à la fois la position de la poche, comme me l’a fait remarqué Yves.
Prototype avec capteurs ZCT-YOF07, détecteurs de proximité
Michel : 15/08/2024 :Au revoir FSR, bonjour ZCT-YOF07
David est un fin dénicheur au clics judicieux puisqu’il à trouvé des capteurs de ”proximité”, je dis de proximité car il ne détecte pas que des niveaux d’eau… J’ai testé rapidement le capteur. Il faudra absolument ”décaler” d’au moins 5 mm le coté non actif de la peau de la jambe de David car le capteur ”voit” aussi la peau, le caoutchouc, le métal, il ne réagirait pas au papier et plastiques et tissu que j’ai ici.
David : est tu prêt à accepté d’avoir une sorte de tissu assez épais, le plus confortable et respirant pour toi, d’au mois 5 mm, entre ta jambe et la poche-mètre?
Je passe te déposer un capteur dans ta boite aux lettres, vendredi après midi, si j’ai un empêchement je te redis, fais les essais et redis-nous.
File:Synoptique prototypeV2.pdf
Michel 15/08/2024 : Le capteur ZCT-YOF07-S030
Voici deux photos du capteur:
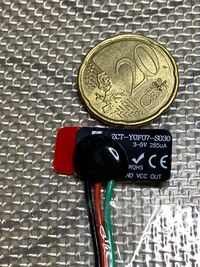
Coté ”non actif” en principe.

Coté actif sur autocollant.


La réponse sur OUT est bien en tout ou rien sur, je pense, un collecteur ouvert.
Yves 15/08/2024
Pour éloigner les capteur de la jambe de David, on pourrait utiliser ce genre de plaque de mousse souple mais pas molle dans laquelle on ferait plein de trous d'aération de 10mm à l'emporte pièce et qu'on envelopperait dans un tissu fin et doux pour le contact avec la peau. (je peux faire la couture de l'enveloppe).
Celle-ci (voir lien) a une épaisseur de 5mm ce qui convient tout à fait car elle n'est pas lourde; mais cela existe aussi en épaisseur de 10mm et plus.
Voici le lien :
Bien entendu on découperait la plaque aux dimensions de la poche.
Michel 15/08/2024
Bonne idée. Cette mousse a l’air dense et donc tu as raison il faudra l’alléger du mieux qu’on peut. Si tu es maître pour la confection de cette pièce alors pour moi c’est ok bien sûr. Au plaisir.
P. S. : David; Je suis à gamberger sur le schéma et de plus en plus convaincu qu’il faudra trois leds… Car que ce soit en anode où cathode commune, comme les émetteurs des collecteurs ouverts des OUT sont à la masse ( si c’est des NPN) on est assez bridé sur une led bicolore à trois fils… Mais bon, je n’ai pas encore tout exploré.
David : 19/08/2024 Choix couleurs leds selon niveaux
L'eau,
Pour le niveau > 250, led rouge et vibreur actif sur appui bouton,
Pour le niveau < 400, led verte via un NPN sur appui bouton,
Soit du jaune entre 250 et 400 sur la bi-couleur.
Votre avis?

Michel : 20/08/2024 Repérage des niveaux vs volumes
J’ai rempli la poche de liquide pour trois volumes seulement (100, 250 et 300 ml) car au delà de 300 ml la poche ne se remplie plus… J’ai aussi repéré les niveaux correspondants à ces volumes en position verticale et horizontale. On constatera que les niveaux montent très peu ( en fin de remplissage) , en fait, la poche se gonfle mais les niveaux changent très peu…. Voici en photos mes résultats:

Conclusion:
Je me rends enfin compte que les volumes physiques ne sont pas intéressant à mesurer car il ne sont pas à l’image de ce que la poche indique. Je pense, et vous confirmerez ou non, qu’il faut placer les capteurs sur la droite inclinée que j’ai tracé en pointillé, et ce en % de la poche pleine comme Yves me l’avait proposé jadis, et que je n’avais pas écouté 😉…
Quand au schéma électrique, je n’ai pas encore vraiment réfléchi sérieusement car combien de capteurs allons nous placer sur cette droite?
Yves : 20/08/2024 Repérage des niveaux vs volumes
je pense que c'est effectivement la bonne façon d'aborder le problème.
Ce qui est surprenant, c'est que les capacités pré-imprimées sur la poche ne correspondant pas à la réalité.
Seul David pourra répondre et dire ce qu'il souhaite comme paliers de mesures, mais s'il y avait déjà 3 capteurs correspondants à 1/4, 1/2 et 3/4 de la capacité maxi ce serait une bonne indication selon moi.
Le fait de mettre les capteurs en ligne (sur la ligne pointillée) permettra d'utiliser un support commun ce qui facilitera leur montage. En y réfléchissant, je me dis que peut-être les capacités imprimées sur la poche seraient exactes si la poche n'était pas contre un obstacle (la jambe) et se gonflerait de façon symétrique sur ses 2 faces. Mais cela ne change rien au problème et il ne faut pas tenir compte de ces indications. Sauf que si elle est vendue pour 500 ml il y a tromperie sur sa capacité.
Michel : 20/08/2024 Repérage des niveaux vs volumes
Concernant les différences entre les repères de la poche et les volumes réels, je pense comme toi que ma maquette de jambe est rigide. Et empêche donc la poche de se gonfler mieux si elle était placée correctement sur une vrai jambe souple. Je vais refaire les tests sur ma jambe pour voir si il y a plus de précisions. Je vous redis.
Michel : 27/08/2024 Retour sur capteurs YO-F07
Les capteurs YO-F07 fonctionnent bien et si on arrive à résoudre le problème que ces capteurs ne sont plus suffisamment proche du niveau de liquide de la poche à cause de son gonflement lors de son remplissage, alors nous pourrons avancer encore.
Je verrai bien un matelas épais (constitué de fibre légère type ouate de filtration pour aquarium) entre la poche et la jambe, le matelas ferait s’épouser les capteurs avec la poche et isolerai le capteur de la jambe (les fameux 5 mm mini à respecter)
J’ai réussi à simuler sur Falstad le circuit électronique que je vous ai soumis (pour trois capteurs et trois LED), le bon choix des MOSFET T1 et T2 seront de type canal P. Ce circuit est donc faisable si l’on conserve le projet des trois capteurs 1/4-3/4 et 4/4 de la poche. Je suis actuellement à court d’idées et de moyens physiques pour continuer…
Si vous voulez on en discute au prochain Open Lab.
│CAPTEUR NIVEAU DE LIQUIDE │ 4 │ 11.5400 U │ 46.16 │3│
│ │DFROBOT SEN0508 2.5/5.5V
Michel : 29/08/2024
David,
J’ai besoin de ton aval, pour poursuivre notre étude sur la Poche-mètre.
Comme mes essais, par collage des trois capteurs sur le coté doux de la poche (celui en contact avec la jambe) n’a pas fonctionné après remplissage complet, Yves et moi avons réalisé, sur ma jambe dans les deux position horizontale et verticale, de nouvelles déterminations des niveaux pour le placement plus précis des YO-F07 (je me suis d’ailleurs rendu compte tard, que j’aurais pu commencer ainsi :-(, plutôt que de faire une maquette). Nous avons une courbe. J’avais une droite, nous pensons Yves et moi que les capteurs doivent épouser la poche et son gonflement par le placement autour de la poche d’une sorte de ”chaussette” en tissus ultra souple (genre jersey) et élastique sur laquelle sera cousu les capteurs et ainsi seront plaqués sur la poche, MAIS : Cela sous entends que toi ou les personnes qui t’aident à placer cette poche, soient en mesure d’enfiler cette ”chaussette” autour de la poche avant la fixation sur ta jambe par les 4 boutons. De plus un matelas en molletton d’au moins 5 mm d’épaisseur, sera intercalé entre ta jambe et cet ensemble, il n’y aura, si j’ai bien compris la construction cousue par Yves, une seule pièce (”chaussette et molleton”), Yves rectifiera si nécessaire. Es tu prêt à accepter ce dispositif auxiliaire à ta poche? Si oui peux tu y réfléchir avant mardi matin, date ou nous irons Yves et moi chez Écolaine à Venin le Coquet, chercher les tissus adéquats?
Qu’en penses tu?
P.S.: le schéma que j’ai pensé est fonctionnel sur Falstad, pour trois capteurs, on est donc paré dès que le defaut de plaquage des capteurs sur la poche est supprimé.
Yves : 29/08/2024
Une petite précision : je pense rendre le molleton amovible et non cousu sur la ”chaussette” afin de permettre le lavage de celle-ci. Cela implique une certaine rigidité au molleton pour l’extraire et surtout le glisser dans la chaussette. J’ai consulté une dame experte en couture qui m’a conseillé sur le matériaux à utiliser notamment le tissu pour la ”chaussette”. A priori celui qui est chez Michel manque de tenue et va poser des problèmes. Une toile genre ”elastiss” serait plus appropriée. A voir au magasin de tissus.
Pour expliciter ces propos, voici une vue un coupe de ce que je pense faire.
Le molleton est solidaire des capteurs et est amovible par rapport à la "chaussette" en tissu. La poche est glissée dans le second compartiment. Ainsi on pourra laver la "chaussette" en ne gardant que la partie en tissu, sans poche et débarrassée des composants et du molleton difficile à sécher.

David : 30/08/2024
Bonsoir Michel ,
Merci pour ce retour.
Je pensais aussi au capteur, je pense qu'on pourrait faire un support en 3D qui suivent la forme de la jambe d'un côté et de l'autre soit légèrement Courbe pour suivre la forme d'une poche pleine et poser les capteurs dessus. On pourra également regarder pour fixer le vibreur et pourquoi pas les deux piles. Dans tous les cas ça va être du prototype, il faut qu'on avance. Donc je suis ok pour faire des tests comme tu l'as indiqué.
Michel : 31/08/2024
Ok. Oui la jambe est courbée dans le sens contraire de la poche gonflée. Yves et moi avons eu un échange à ce sujet (jambe concave et poche convexe).
Je vois avec Yves demain comment on peut goupiller tout ça.
Yo : 31/08/2024
Si avec ces tests là le résultat n'est pas convaincant, il restera à tester avec un débitmètre, ainsi la valeur de liquide sera précise... Pour le vibreur pas de problème je referai le schéma avec.
Yves : 02/09/2024
Voici une modélisation d'un support pour la poche telle que je te la décrivait tout à l'heure. Le demi-collier est articulé en 3 morceaux pour s'adapter à la courbure de la jambe. Sur sa face intérieure, on colle une mousse néoprène pour un contact plus confortable. La bande velcro fait une boucle qui passe dans les 2 fentes à chaque bout du collier.
Le même support peut être dupliqué pour le bas de la poche mais ce n'est peut-être pas nécessaire. A voir...


Michel: 02/09/2024
Très bien, j’irai même jusqu’à arc-bouter en convexe le support à bouton de la poche. Je pense qu’il faut en effet faire la même chose pour le bas de la poche.
David nous dira ce qu’il en pense, mais c’est du bon travail.
Premieres prises de mesure in situ 05/09/2024
Capacité théorique 500ml, réalité 400ml dans conditions optimales (poche dans le vide)
Tests sur mollet gauche de Michel
Position jambe verticale :
- Led Verte, s’allume à 150ml
- Led bleue s'allume à 220 ml,
- Led rouge s'allume à 300ml
Position jambe allongée :
- Led verte s’allume à 60ml
- Led bleue s'allume à 90ml
- Led rouge s'allume à 180 ml
Attention au sens de la poche soit sur l’interieur ou exterieur de la poche car sinon le capteur vert s’allume en premier en position allongé (Sur la jambe de Michel il a fallu mettre la poche sur l'extérieur de la jambe car c'était la jambe gauche)
Tests sur jambe droite de David, poche vers l'intérieur de la jambe
David:test sur jambe droite de David
Allongé :
- 75ml : vert
- 100ml : bleu
- 150ml : rouge
Verticale :
- vert : 130ml
- bleu : 210ml
- rouge : 330ml
Frais projet
- Tissus Myrtille: 15.52
Yves : Modélisation 3D : 06.09.2024
Voici les STL à imprimer pour le Poche-mètre de David avec l'image du sens d'impression.
Il y a 2 boutons et 2 boucles par support et il faut imprimer cet ensemble de pièces 2 fois (en haut du mollet et un autre en bas).
Je joins en plus des STL les images de ce dossier.
PS : On a besoin en plus de 2 boulons de 2,5x25 mm et de 2 écrous de 2,5 par support.
David amènera les bandes élastique de 35mm et le velcro jeudi prochain.
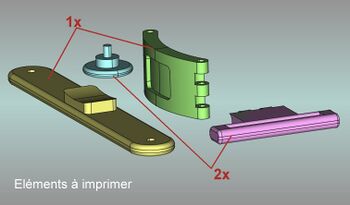
Modélisation 3D à imprimer dans le sens indiqué sur la photo
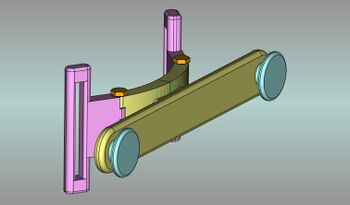
Vue du montage des pièces imprimées
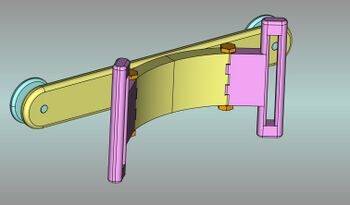
Vue du montage des pièces imprimées



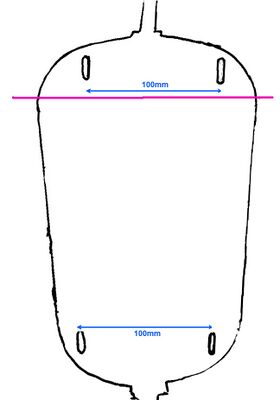
Patron de la poche
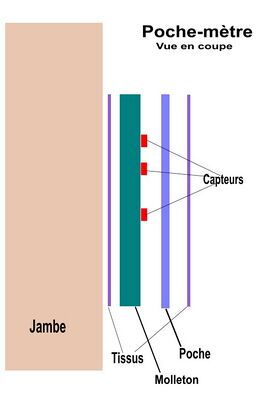
Vue du Poche-mètre en coupe


Delphine : commande vis 06.09.2024
- vis M2,5x25
Michel: Boitier 09.09.2024
David,
J’ai trouvé un boitier provisoire pour placer l’électronique du projet ‘DIPTAL chez Atlantique C.), ainsi qu’un poussoir moins profond, je ferais le bouton du poussoir en PLA adapté à ta force et a ton ergonomie, (Surface/pression).
Confirmes-moi que:
Le moteur haptique fonctionne en même temps que la LED rouge ”Poche pleine” en vertical après interrogation au poussoir?
Que tu veux que sur ”poche pleine” à l’horizontal uniquement le moteur haptique se mette en route tout seul avec la LED rouge sans pression sur le poussoir d’interrogation du volume de la poche?
Ces questions pour me permettre d’établir le schéma théorique (papier et gamberge) le plus rapidement possible.
Je pense qu’il va être très probable que l’on détecte l’horizontalité de la verticalité, car la poche et ses niveaux sont différents dans les deux positions.
Voici la photo du boitier et du poussoir:

David 11.09.2024
"Le moteur haptique fonctionne en même temps que la LED rouge ”Poche pleine” en vertical après interrogation au poussoir?" Je te confirme, c'est exactement ce qu'on avait discuté.
"sur ”poche pleine” à l’horizontal uniquement le moteur haptique se mette en route tout seul avec la LED rouge sans pression sur le poussoir d’interrogation du volume de la poche?"
Sans pression sur le bouton poussoir peut-être qu'en utilisant un Fsr il y a moyen de mettre sous tension un système. Respecte est correct reste à voir la solution technique.
La solution marche peut-être à l'horizontale mais également à la verticale.
La solution est sûrement dans la mise sous tension...
Michel 11.09.2024
Hier toute la journée j’ai tenté de trouver une solution, à thyristor (ou bien deux transios tête bêche un NPN et un PNP) mais pour l’instant c’est pas au point, ça me plait pas..
Oui le FSR pourrait déclencher le moteur haptique, mais il faut le placer au bon endroit sur la poche et nous savons que les ”réponses” de FSR ne sont pas top.
Je propose quand même une amorce de recherche mais qui sur la bread board ne fait que ”marchouiller”.
Si vous repérez une anomalie, dites le moi (dans la section à vérifier).
Commande de diodes
Christian 11.09.2024
Pourquoi ne pas utiliser un mosP, comme tu as utilisé pour shunter les LEDs. S sur +3v, avant le poussoir, D, après le poussoir. Et G , sur un pont diviseur, R1 sur 3v et G et le FSR entre G et gnd. Valeur de R1, a calculer.
A tester.
Michel 12.09.2024
Oui en effet j’y ai pensé, mais il me semblait que David voulait un système à ”mémoire”, un auto-maintient, la poche pleine déclenche le vibreur haptique et reste en marche, c’est pourquoi le thyristor, il faut que je re-questionne David sur cela.
Je vais te questionner tout à l’heure sur ce montage de deux transios tête bêche, je n’ai pas tout compris…
Delphine 13.09.2024 : Photos du prototype

Poche placée sur boutonnière
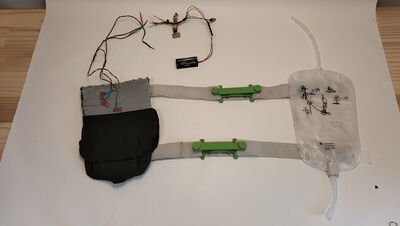
Les différentes parties constituant le prototype

Sangles avec support en 3D pour accrocher les poches
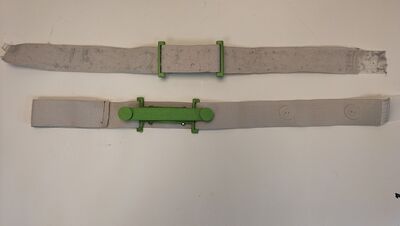
Sangles boutonnières




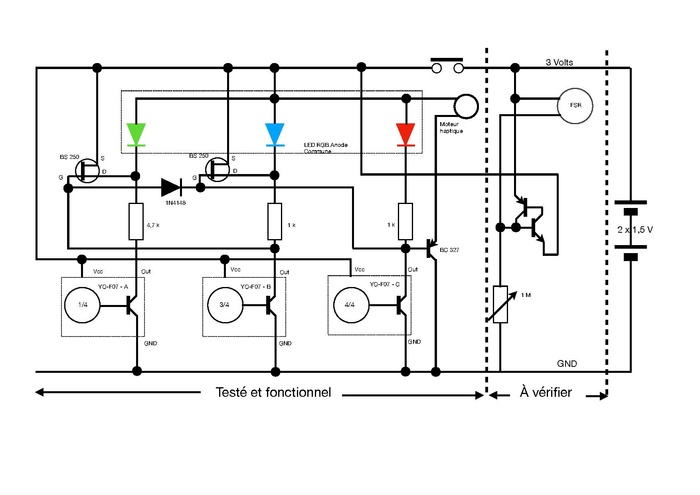
Michel :15/09/2024 :Qui n'avance pas recule
J’ai mis au point ceci :
Ça marche mais il faut minimum 3,7 à 4 volts pour bien faire fonctionner le thyristor… Désolé.
Ce schéma met le circuit sous tension quand la poche est pleine par le FSR comme j’ai cru comprendre, et reste en fonctionnement jusqu’à ce que tu appuie sur le poussoir d’interrogation de volume.
Pour l’instant je ne suis pas parvenu à traduire tes volontés en schéma électrique en ce qui concerne le ”clignotement” du vibreur sans créer un circuit auxiliaire commandé par le FSR et l’horizontalité.
Le système se complexifierait, du coup.
Il faudrait bien m’écrire une sorte de cahier des charges, pour éviter que je ne dérive.
P.S: Voici une pile 3,7 volts au Li-Ion, (18350) mais ne trouve pas de support :-(