Différences entre versions de « Projets:Roboto »
| Ligne 837 : | Ligne 837 : | ||
== Durée de fabrication du prototype final == | == Durée de fabrication du prototype final == | ||
| − | |||
[[Category:Projets]] | [[Category:Projets]] | ||
| + | [[Category:Réalisés]] | ||
| + | [[Category:Mobilité]] | ||
Version du 20 novembre 2019 à 15:01
Description du projet
Projet de robot sur roulette télécommandé en bluetooth. Ce prototype est un robot conteur sur roulettes télécommandé en bluetooth avec une manette nunchuck pour les déplacaments. Sur le chassis est fixé une tablette sur laquelle il y a des contes que l'on peut lire en manipulant la tablette. Il a été réalisé en collaboration avec l' artiste Mari Gwalarm pour l'habillage du robot et a été réalisé de manière collaborative auprès d'un public diversifié de 6 à 99 ans avec le soutien de My Human Kit.
Ce prototype est un objet pédagogique avec la finalité de servir dans des médiathèques.

Liens utiles
- Page du projet sur le GesLab
- Canal de discussion du projet sur Framateam
- Documentation finale du projet
- Dépôt GitHub du projet
Cahier des charges
Analyse de l'existant
Equipe (Porteur de projet et contributeurs)
- Porteur de projet :Sébastien Lutz
- Contributeurs :Yves Le chevalier
- Fabmanager référent : Delphine Bézier
Matériel nécessaire
Bois de palette récupération

Plaque aluminium support moteur

Fichier svg:Fichier à télécharger
roues robot

entretoise roues robot

Visses et boulonnerie
A ajuster suivant la construction et l'épaisseur du bois
batterie 12volt 12AH + Chargeur de batterie 12V

2 led ring12
Les anneaux de LED étaient prévus initialement pour faire des yeux multicolores mais n'ont finalement pas été implanté. Pour information voici la référence.

Un support pour les anneauux a été modélisé en 3D, à retrouver dans les fichiers sources.
Interrupteurs
Interrupteur pour le boitier 3d

Interrupteur pour le boitier électrique pour éviter une consommation de courant inutile
moteur à démultiplication
Description
Takanawa motoréducteur 555 métallique 12v - 24v motoréducteur à courant continu
spécification
- modèle dcmotor RS- 555
- tension appropriée 12v-24v
- vitesse 10-20-40-80 tr / min
- courant de charge 2.5a
- Vitesse à vide DC12V 3000-3500r / min
- dc la 7000-8000r / min
- grandeur diamètre : 37 mm
- longueur: 65 mm
- poids 502g
- longueur de l'arbre 16mm
https:/www.banggood.com/fr/TAKANAWA-555-Metal-Gear-Motor-12V-24V-DC-Gear-Motor-p-995307.html?rmmds=myorder&cur_warehouse=CN


carte arduino uno

carte arduino nano

Contoleur moteur

manette de wii filaire

Adaptateur nunchuck

hc05 :module bluethooth à configurer en maitre et exclave


pile 9volt

impression 3d du boitier commande avec LED
Le boitier est conçu pour ne pas arracher le fil de la nunchuk

coffret électrique
bien vérifier les dimensions pour la batterie suivant l'emplacement
Découpe à l'intérieur pour faire de la place mais attention si vous voulez garder l’étanchéité, acheter un coffret électrique

Préparation du châssis
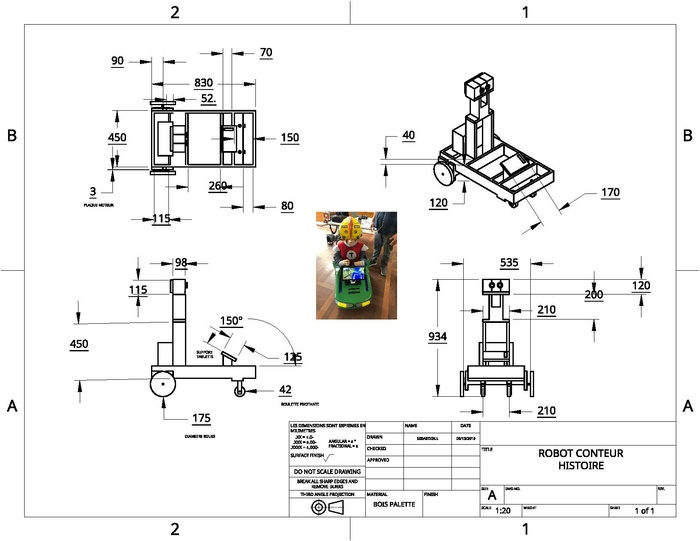
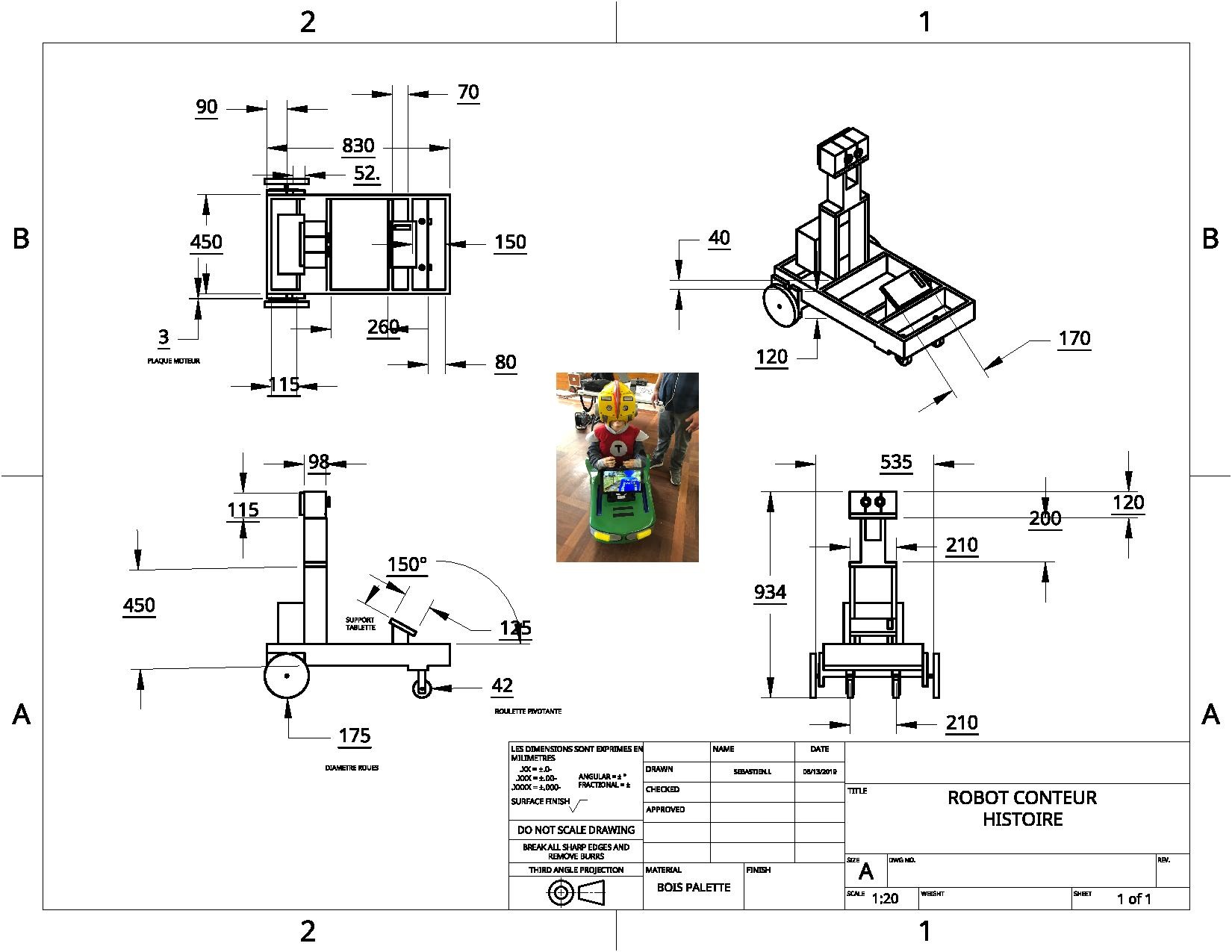

Schéma branchement Arduino batterie motor shield

Intro
Nous avons deux HC-05 qui sont maîtres par défaut. Il faut d'abord configurer les deux HC-05 (l'un en maitre et l'autre en esclave avant de pouvoir les faire communiquer.
Cette procédure se passe en mode commande (AT mode).
Nous allons d'abord configurer l'esclave puis le maître.
Pour cela, réaliser les deux montages (maître et esclave en mode AT).
Schéma Esclave Mode AT
On peut brancher le module HC-05 sur 5V (et pas 3V3).
Le key est connecté au 3.3V en mode AT

Schéma Maître Mode AT
Code
Avant de téléverser le programme sur la carte arduino, débrancher le module HC-05 de l'alimentation
#include <SoftwareSerial.h>
SoftwareSerial BTSerial(10, 11); // RX | TX
void setup()
{
pinMode (10, INPUT);
pinMode (11, OUTPUT);
pinMode(9, OUTPUT); // this pin will pull the HC-05 pin 34 (key pin) HIGH to switch module to AT mode
digitalWrite(9, HIGH);
Serial.begin(38400);
Serial.println("Enter AT commands:");
BTSerial.begin(38400); // HC-05 default speed in AT command more
}
void loop()
{
// Keep reading from HC-05 and send to Arduino Serial Monitor
if (BTSerial.available())
Serial.write(BTSerial.read());
// Keep reading from Arduino Serial Monitor and send to HC-05
if (Serial.available())
BTSerial.write(Serial.read());
}
Configurer deux HC-05 master : un maitre et l'autre esclave
Source:http://blog.zakkemble.net/getting-bluetooth-modules-talking-to-each-other/
Configuration du maitre comme esclave
Reset to defaults:
AT+ORGL
Clear any paired devices:
AT+RMAAD
Set PIN:
AT+PSWD=1234
Slave mode:
AT+ROLE=0
Get the address of the device:
AT+ADDR?
Now that you have the address you can skip the AT+INQ and AT+RNAME? parts for configuring the master.
Turn off the module, disconnect key from 3.3V and turn back on. <note warning>Eteindre la board, déconnecter le Key du 3.3V et rallumer la board</note>
Schema Esclave Mode COM

Configuration du maitre
Now, to get the master to connect to the slave module you will need to find the address of the slave. **Make sure the slave module is powered up** and enter these commands into the master module:
Reset to defaults:
AT+ORGL
Clear any paired devices:
AT+RMAAD
Master mode:
AT+ROLE=1
Need to restart after changing role:
AT+RESET
Allow connecting to any address:
AT+CMODE=1
Inquire mode – Standard, stop after 5 devices found, (or) stop searching after 5 seconds:
AT+INQM=0,5,5
Set PIN, should be the same as the slave:
AT+PSWD=1234
Start SPP profile lib (needed to do any Bluetooth transmitting/receiving):
AT+INIT
Note: If it says Error:(17) then that means it’s already loaded, you can carry on.
Start searching:
AT+INQ
A short list of devices found should appear, one of them will be the slave module.
The format of the output is as follows:
+INQ:address,type,signal
Type can be ignored. The signal will be 7FFF since inquire is in standard mode, in RSSI mode you’ll get a load of the same device but with different signal levels which you don’t want at the moment.
Copy the address part of the devices found, for example 12:3:289431 and change the colons to commas – 12,3,289431. To find out which device is the slave module you will need to query each address for its name:
AT+RNAME? <address>
Replace <address> with address of device like 12,3,289431
Response should be +RNAME:linvor if you’re using a normal slave module or +RNAME:HC05 if you’re using a master module as a slave.
Now you’ve got the address of the slave module you need to pair with it:
AT+PAIR=<address>,<timeout>
Note: If you are going to make the master connect to your phone then you need to set the timeout long enough for you to type in the PIN.
Bind address:
AT+BIND=<address>
Only allow connecting to the bound address:
AT+CMODE=0
And now to actually connect:
AT+LINK=<address>
If successful the slave LED should be on solid and the master LED should have a heartbeat flash pattern.
The modules have now been configured! They should automatically connect to each other whenever possible.
A full list of commands for master modules can be found in the download below.
Sending data
Now, if you entered AT mode on the master module by connecting key to 3.3V before turning on the module, you will need to turn off the module, disconnect key (if not enough plug it to Ground) and turn it back on. If you connected key while the module was on then all you need to do is disconnect key.
Maître Mode COM
Arduino:hc-05 master modecom ok.jpg?direct&600
{kind=link}
Envoyer et recevoir des données en Mode COM
Si vous voulez avoir sur le même ordinateurs les deux consoles série d'ouverte, il faut lancer deux instances de l'IDE d'Arduino, afin de tester la communication entre les deux sketchs (maitre et esclave). Ouvrez 2 consoles série et envoyer un message. Vérifier qu'il est bien reçu dans l'autre console. Cela doit fonctionner dans les deux sens.
Sketchs pour envoyer des données depuis une variable (msg)
Source: https://www.instructables.com/id/How-to-Configure-HC-05-Bluetooth-Module-As-Master-/
Sketch maître
#include <SoftwareSerial.h>
//SoftwareSerial ArduinoSlave(2,3);
SoftwareSerial ArduinoSlave(10, 11); // RX | TX
//SoftwareSerial ArduinoSlave(10, 11); // RX | TX
String answer;
String msg;
void setup(){
Serial.begin(38400);
Serial.println("ENTER Commands:");
ArduinoSlave.begin(38400);
}
void loop(){
//Read command from monitor
readSerialPort();
//Read answer from slave
while (ArduinoSlave.available()) {
delay(100);
if (ArduinoSlave.available() >0) {
char c = ArduinoSlave.read(); //gets one byte from serial buffer
answer += c; //makes the string readString
}
}
//Send data to slave
if(msg!=""){
Serial.print("Master sent : ");
Serial.println(msg);
ArduinoSlave.print(msg);
msg="";
}
//Send answer to monitor
if(answer!=""){
Serial.print("Slave received : ");
Serial.println(answer);
answer="";
}
}
void readSerialPort(){
while (Serial.available()) {
delay(10);
if (Serial.available() >0) {
char c = Serial.read(); //gets one byte from serial buffer
msg += c; //makes the string readString
}
}
Serial.flush();
}
Sketch esclave
#include <SoftwareSerial.h>
//SoftwareSerial ArduinoMaster(2,3);
SoftwareSerial ArduinoMaster(10, 11); // RX | TX
String msg;
void setup(){
Serial.begin(38400);
ArduinoMaster.begin(38400);
}
void loop(){
readSerialPort();
// Send answer to master
if(msg!=""){
Serial.print("Master sent : " );
Serial.println(msg);
ArduinoMaster.print(msg);
msg="";
}
}
void readSerialPort(){
while (ArduinoMaster.available()) {
delay(100);
if (ArduinoMaster.available() >0) {
char c = ArduinoMaster.read(); //gets one byte from serial buffer
msg += c; //makes the string readString
}
}
ArduinoMaster.flush();
}
Photos montage
{kind=link}
{kind=link}
{kind=link}
Schemas trouvés en ligne
https://www.gme.cz/data/attachments/dsh.772-148.2.pdf
Arduino:img 4657.jpg?direct&600
{kind=link}
Arduino:hc-05 connections.jpg?direct&600
{kind=link}
AT commands
Les commandes les plus utiles
AT : Vérifier la connection
AT+NAME :Voir le nom par défaut
AT+ADDR : Voir l'adresse par défaut
AT+VERSION : Voir la version
AT+UART : Voir le baudrate
AT+ROLE: Voir le rôle du module bluetooth (1=master/0=slave)
AT+RESET : Réinitialiser et quitter le mode AT
AT+ORGL : restaurer la configuration usine
AT+PSWD: Voir le mot de passe par défaut
Circuit maitre : Nano+Nunchuck+BT
Test avec TEST_BLUETOOTH.ino
Role 1 attribué en bluetooth ok.
AT+BIND=>pour trouver l'adresse à laquelle il est lié
Role maître : +BIND:98d3:31:f41bcf (adresse esclave)
Circuit esclave Uno+Moteurs+BT
Role 0 attribué en bluetooth ok.
https://www.aranacorp.com/fr/votre-arduino-communique-avec-le-module-hc-05/
https://letmeknow.fr/blog/2013/10/09/tuto-commander-un-relais-en-bluetooth/
https://www.instructables.com/id/How-to-Configure-HC-05-Bluetooth-Module-As-Master-/
AT+STATE?
AT+IRQ
https://arduino.stackexchange.com/questions/52846/scan-bluetooth-devices-using-hc-05
https://cdn.instructables.com/ORIG/FI9/7NJR/IRXT0JIG/FI97NJRIRXT0JIG.pdf
https://www.youtube.com/watch?v=hyME1osgr7s
AT+RMAAD pour annuler pairing
https://cdn.instructables.com/ORIG/FI9/7NJR/IRXT0JIG/FI97NJRIRXT0JIG.pdf
https://www.instructables.com/id/HOW-TO-HC-05-Bluetooth-MODULE-AT-Commands-With-But/
AT+UART (config du baudrate)
http://sti2d-sin-isn.blogspot.com/2018/02/auto-connexion-de-deux-modules.html
Le TUTORIEL avec toutes les étapes
Attention à l'ordre dans lequel on branche/débranche le key.
Faire une AT+reset après avoir débranché le key ou l'inverse, regarder ce lien pour la procédure
Brancher le pin enable sur le GROUND pour switcher en mode communication
essayer en laissant le pin key sur 3.3V (apres avoir éteint la board) pour switcher du mode AT
https://www.teachmemicro.com/hc-05-bluetooth-command-list/
http://forum.hobbycomponents.com/viewtopic.php?f=39&t=1567
Bluetooth+motor+joystick example
https://forum.arduino.cc/index.php?topic=413699.15
https://www.instructables.com/id/Wireless-Wii-Nunchuck-control-of-Arduino-projects/
Reconstruire un nombre en recevant ses éléments un par un
https://openclassrooms.com/forum/sujet/hc-06-et-arduino
// Variable globale (à placer en dehors du loop)
int pwmval = 0;
// Partie traitement (à placer dans le loop)
if ( Serial.available() ) {
char c = Serial.read();
if ( ( c >= '0' ) && ( c <= '9' ) ) {
pwmval = ( ( pwmval * 10 ) + ( c - '0' ) );
} else if ( c == 'x' ) {
analogWrite(pinX, pwmval);
pwmval = 0;
} else if ( c == 'y' ) {
analogWrite(pinY, pwmval);
pwmval = 0;
}
}
Librairie pour retrouver les données reçues
https://github.com/jlebunetel/WiiExpansion
code final
/*
# Product: DC Motor Driver 2x15A_lite
# SKU : DRI0018
# Description:
# Drive 2 motors with this DC Motor Driver module
# Hardwares:
1. Arduino UNO
2. DC Motor Driver 2x15A_lite
3. DC motors x2
#Steps:
1.Connect the DMotD_PWM & DMotG_PWM to UNO digital 5 & 6
2.Connect the DMotD_EN & DMotG_EN to UNO digital 4 & 7
3.Connect +5V & GND to UNO 5V & GND
*/
//Bluetooth
#include <SoftwareSerial.h>
SoftwareSerial ArduinoMaster(10, 11); // RX | TX
//nunchuck+bluetooth
int joyX;
int joyY;
int joyC;
int joyZ;
int valeurs_joystick[4] = {0, 0, 0, 0};
int valeurs_joystick_precedent[4] = {0, 0, 0, 0};
//DC Motor Driver pins
int VMotD = 5; //VMotD Speed Control mot droit
int VMotG = 6; //VMotG Speed Control mot gauche
int DMotG = 7; //DMotD Direction Control
int DMotD = 4; //DMotD Direction Control
//infos moteurs
boolean p;//détection d'un pivotement
int smg;//sens moteur gauche
int smd;//sens moteur droite
int vmg;//vitesse moteur gauche
int vmd;//vitesse moteur droite
float b;//valeur(amplitude) du braquage
int v1;//valeur vitesse moteur 1
int v2;//valeur vitesse moteur 2
int var [4] = {0, 0, 0, 0};
int k = 0;
void setup() {
//motor driver
int i;
for (i = 4; i <= 7; i++)
pinMode(i, OUTPUT);
Serial.println("Run keyboard control");
digitalWrite(VMotD, LOW);
digitalWrite(VMotG, LOW);
//bluetooth serial
Serial.begin(38400);
Serial.println("Bluetooth nunchuck esclave start");
ArduinoMaster.begin(38400);
}
void loop() {
while (ArduinoMaster.available() > 0 ) {
char car = ArduinoMaster.read();
// while (Serial.available() > 0 ) {
// char car = Serial.read();
// Serial.print(car);
switch (car) {
case '\n': // fin de données
renvoi();
execution();
k = 0;
break;
case ';': // séparateur
k++;
break;
default:
var[k] = (var[k] * 10) + (car - 48);
break;
}
// delay(50);
}
delay(10);
}
void renvoi() {
joyX = var[0];
joyY = var[1];
joyC = var[2];
joyZ = var[3];
Serial.print("Brut ");
Serial.print("joyX :");
Serial.print(joyX);
Serial.print(" joyY :");
Serial.println(joyY);
Serial.print(" joyC :");
Serial.print(joyC);
Serial.print(" joyZ :");
Serial.println(joyZ);
for (k = 0; k < 4; k++) {
Serial.println(var[k]); // renvoi des valeurs reçues
var[k] = 0;
}
// delay(50);
}
void execution() { // execution ordre recu
// v1 = 0;
//v2 = 0;
int joyX1 = map(joyX, 26, 231, -255, +255);
int joyY1 = map(joyY, 35, 226, -255, +255);
joyX = constrain (joyX1, -255, +255);
joyY = constrain (joyY1, -255, +255);
Serial.print("Remappé ");
Serial.print(" joyX :");
Serial.print(joyX);
Serial.print(" joyY :");
Serial.println(joyY);
//Pour éviter de consommer du courant on attribue une plage neutre plus large que zéro
if ((joyX < 32) && (joyX > -32)) {
joyX = 0;
Serial.print(" joyXX :");
Serial.print(joyX);
}
if ((joyY < 25) && (joyY > -25)) {
joyY = 0;
Serial.print(" joyYY :");
Serial.println(joyY);
}
//détection du pivotement x
if ((joyX != 0)&& (joyY == 0)) {
p = 1;
} else p = 0;
//calcul du sens de rotation des moteurs (attention les moteurs sont montés en miroir)
if (p == 1) {
if (joyX < 0) { //tourne à gauche
smg = 0;
smd = 0;
} else { //tourne à droite
smg = 1;
smd = 1;
}
} else if (joyY < 0) { //recule
smg = 0;
smd = 1;
} else { //avance
smg = 1;
smd = 0;
}
//calcul valeur du braquage (amplitude du braquage)
if (joyX < 0) {
b = joyX * -1;
} else {
b = joyX;
}
//si pivotement (cad que le centre de rotation est entre les deux moteurs), les deux moteurs vont à la même vitesse
if (p == 1) {
vmg = b;
vmd = b;
}
else {
if (joyY < 0) { //calcul de 2 vitesses v1 et v2 qui seront affectées au moteur
v1 = joyY * -1; //on calcule la valeur absolue de la vitesse moteur 1
}
else { v1 = joyY; }
Serial.print("v1 :");
Serial.println(v1);
Serial.print("v2 :");
Serial.println(v2);
v2 = v1 - (v1 * (b / 255));
Serial.print("v1 :");
Serial.println(v1);
Serial.print("v2 :");
Serial.println(v2);
// ajout ylc du 30/03/19
/* compte tenu des moteurs (24v utilisés en 12v) il est nécéssaire de "doper" les vitesses qui leurs sont affectées
lors des virages en affectant à la roue la plus rapide la vitesse maximale et en augmentant la vitesse de la roue
la moins rapide dans la même proportion. */
float c = 255 / v1;
v1 = 255;
v2 = v2 * c;
// fin ajout ylc du 30/03/19
// Affectation des vitesses de rotation des moteurs des moteurs selon la direction où aller (droite ou gauche)
if ((joyX == 0) && (joyY == 0)) {
v1 = 0;
v2 = 0;
}
if (joyX < 0) {
vmg = v2;
vmd = v1;
}
else {
vmg = v1;
vmd = v2;
}
/* if (joyX < 0) {
vmg = v2;
vmd = v1;
}
else if (joyX > 0) {
vmg = v1;
vmd = v2;
}
else if ((joyX == 0)&& (joyY == 0)) {
vmg = 0;
vmd = 0;
smg=0;
smd=0;
}
*/
}
Serial.print("vmg :");
Serial.println(vmg);
Serial.print("vmd :");
Serial.println(vmd);
Serial.print("p :");
Serial.println(p);
Serial.print("smg :");
Serial.println(smg);
Serial.print("smd :");
Serial.println(smd);
control_moteur();
}
////motor driver
void control_moteur() { //Move forward
analogWrite (VMotG, vmg); //PWM Speed Control
digitalWrite(DMotG, smg); //DMotD, direction control=p
analogWrite (VMotD, vmd);
digitalWrite(DMotD, smd);
}