Différences entre versions de « Projets:Air GO »
| (11 versions intermédiaires par le même utilisateur non affichées) | |||
| Ligne 4 : | Ligne 4 : | ||
|Evènement associé=Fabrikarium Palavas 6 au 8 juin 2023 | |Evènement associé=Fabrikarium Palavas 6 au 8 juin 2023 | ||
|Porteur de projet=HugoPaolantonacci | |Porteur de projet=HugoPaolantonacci | ||
| − | |Contributeurs=AnatoleCoste, | + | |Contributeurs=Dobrecourt, AnatoleCoste, samp38, Yo |
|Fabmanager=Sijobert | |Fabmanager=Sijobert | ||
|Animateur=Sijobert | |Animateur=Sijobert | ||
| Ligne 24 : | Ligne 24 : | ||
== Description du projet == | == Description du projet == | ||
Hugo pilote son fauteuil roulant avec son menton. Il dispose aujourd’hui d’un système développer au Humanlab Saint-Pierre lui permettant via un interrupteur au niveau du cou, d’ôter et de remettre son joystick, ceci plus de 40 fois par jour! ([https://wikilab.myhumankit.org/index.php?title=Projets:Automatisation_Support_Joystick_Menton_Fauteuil_Roulant Projet Initial]) Cette utilisation intensive démontre le caractère indispensable de cette solution pour Hugo! | Hugo pilote son fauteuil roulant avec son menton. Il dispose aujourd’hui d’un système développer au Humanlab Saint-Pierre lui permettant via un interrupteur au niveau du cou, d’ôter et de remettre son joystick, ceci plus de 40 fois par jour! ([https://wikilab.myhumankit.org/index.php?title=Projets:Automatisation_Support_Joystick_Menton_Fauteuil_Roulant Projet Initial]) Cette utilisation intensive démontre le caractère indispensable de cette solution pour Hugo! | ||
| + | |||
Comment améliorer ce premier prototype en s’affranchissant de la durée de vie limitée des composants mécaniques actuels ? C’est le projet Air’Go mené dans le cadre du Fabrikarium Palavas 2023! | Comment améliorer ce premier prototype en s’affranchissant de la durée de vie limitée des composants mécaniques actuels ? C’est le projet Air’Go mené dans le cadre du Fabrikarium Palavas 2023! | ||
== Cahier des charges == | == Cahier des charges == | ||
| + | * Système interchangeable. | ||
| + | * Remplacement facile des différents composants. | ||
| + | * Changer la technologie de la batterie(18650 Li-on avec battery charger) + modéliser son nouveau boitier. | ||
| + | * Connexion de la batterie rapide ou arrêt d’urgence batterie. | ||
| + | * Poche Kevlar au cas où la batterie soit en court circuit. | ||
| + | * Prévoir un système avec des connexions étanches. | ||
| + | * Ergonomie de la commande. | ||
| + | * Fiabiliser - Sécuriser - Faciliter la maintenance. | ||
| + | * Changer le bouton d’activation du système | ||
== Analyse de l'existant et liens utiles== | == Analyse de l'existant et liens utiles== | ||
| + | * Projet initial : [https://wikilab.myhumankit.org/index.php?title=Projets:Automatisation_Support_Joystick_Menton_Fauteuil_Roulant] | ||
== Matériel == | == Matériel == | ||
| + | * Arduino pro mini (prévoir un adaptateur FTDI ou un Arduino Uno pour téléverser le code) | ||
| + | * DRV8838 (pont en H permettant de commander le moteur DC) | ||
| + | * Batteries Li-on 18650 (x2 : 7.4V pour alimenter le moteur, mais une seule cellule est utilisée pour alimenter l'arduino). | ||
| + | * Un chargeur USB pour 2 cellules (avec connecteur JST XH-3P) d'au moins 2A. | ||
==Outils== | ==Outils== | ||
| + | * Imprimante 3D pour les boitiers | ||
| + | * Fer à souder / Matériel électronique pour réaliser le circuit | ||
| + | * Un PC pour programmer l'Arduino (avec un module FTDI) | ||
| + | |||
| + | == Mode d'opération == | ||
| + | This setup mean to drive a retractable arm that hold a joystick needed to stir an electrical weelchair. The arm can be retracted/extended to its end positions or stopped inbetween. The system is composed of : | ||
| + | |||
| + | * a push button big enough to be actuated with the head. (temporary contact, normally open) | ||
| + | * an arduino mini pro (atmega328p in its 3.3v version preferably) | ||
| + | * a DC motor H-Bridge driver (DVR 8838) to drive the linear actuator that moves the arm the linear actuator itself, with en of course switches that autmatically open the power circuit when the it reaches its end of course positions | ||
| + | |||
| + | Once assembled, the system works as described : | ||
| + | |||
| + | * a long press will retract the arm | ||
| + | * a double press will extend the arm | ||
| + | * a simple press will stop the arm | ||
| + | |||
| + | The system works on 7.4 Li-Ion battery, but the arduino mini pro is powered by one cell only on its RAW input, to shunt the voltage regulator. You also have to remove the led on the arduino, so it won't draw current during deep sleep. With this setup, we're able to draw 5 uA in deep sleep mode. As the arduino mini pro doesn't have a usb2serial chip, you will have to program it with an external programmer (arduino as isp, ftdi...). | ||
| − | == | + | == Spécifications du firmware == |
| + | * Smart push button with actions linked to different press types (short press, long press and double press) | ||
| + | * deep sleep, wake on external interrupt of the push button | ||
| + | * drive DC motor CW or CCW depending on state | ||
| + | * (optional) motor current monitoring via shunt resistor and avr ADC | ||
==Fichiers source== | ==Fichiers source== | ||
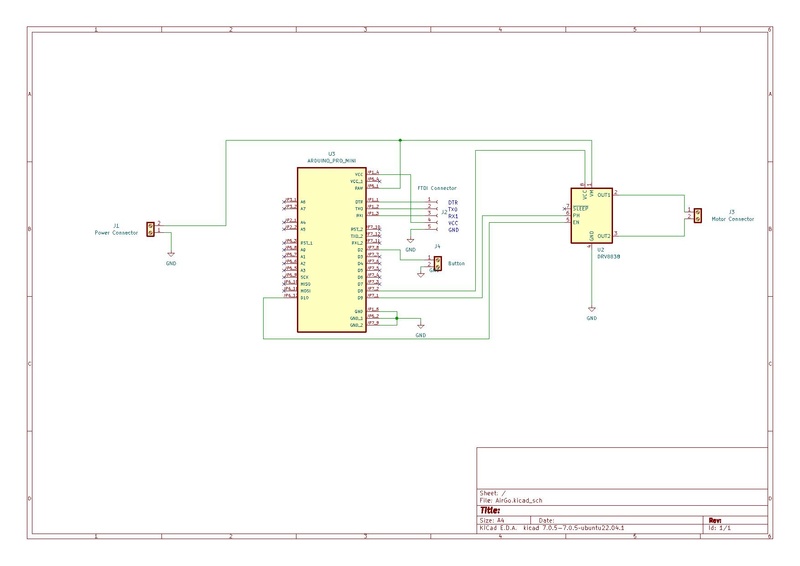
| + | * [[Média:Schéma Electronique Projet AirGo.pdf| Schéma Electronique du Projet Air GO]] | ||
| + | [[Fichier:Schéma Electronique Projet AirGo.pdf|800px]] | ||
| − | + | * [[Média:Airgo firmware-master.zip| Code Source Projet Air GO (A TELECHARGER)]] | |
| + | * [https://github.com/samp38/airgo_firmware Lien GITHUB] | ||
==Retours utilisateurs== | ==Retours utilisateurs== | ||
| + | * Après plusieurs mois d'utilisation, Hugo paraît toujours autant ravi de cette V2 du système ! Fiable et robuste, tout fonctionne à merveille et répond à ses besoins. | ||
Version actuelle datée du 19 septembre 2023 à 11:46
| Air GO
| |
|---|---|
| Informations | |
| Description | Un système permettant d'automatiser l'avancée et le retrait du joystick sous le menton d'Hugo. |
| Evènement associé | Fabrikarium Palavas 6 au 8 juin 2023 |
| Catégorie | Mobilité |
| Sous catégorie mobilité | Assistance mécanique |
| Etat d'avancement | Réalisés |
| Techniques | impression 3d, électronique |
| Durée de fabrication | de 4 à 8 h |
| Coût matériel | De 50 à 100 euros |
| Niveau | Moyen |
| Licence | by-nc-sa |
| Date de création | 2023-06-06 |
| Équipe | |
| Porteur de projet | HugoPaolantonacci |
| Contributeurs | Dobrecourt, AnatoleCoste, samp38, Yo |
| Animateur | Sijobert |
| Fabmanager | Sijobert |
| Référent documentation | Sijobert |
| Partenaires: | INRIA |
| Nom humanlab | Humanlab_SP |
| Documentation | |
| Statut de la documentation | Partielle |
| Relecture de la documentation | Non vérifiée |

Description du projet
Hugo pilote son fauteuil roulant avec son menton. Il dispose aujourd’hui d’un système développer au Humanlab Saint-Pierre lui permettant via un interrupteur au niveau du cou, d’ôter et de remettre son joystick, ceci plus de 40 fois par jour! (Projet Initial) Cette utilisation intensive démontre le caractère indispensable de cette solution pour Hugo!
Comment améliorer ce premier prototype en s’affranchissant de la durée de vie limitée des composants mécaniques actuels ? C’est le projet Air’Go mené dans le cadre du Fabrikarium Palavas 2023!
Cahier des charges
- Système interchangeable.
- Remplacement facile des différents composants.
- Changer la technologie de la batterie(18650 Li-on avec battery charger) + modéliser son nouveau boitier.
- Connexion de la batterie rapide ou arrêt d’urgence batterie.
- Poche Kevlar au cas où la batterie soit en court circuit.
- Prévoir un système avec des connexions étanches.
- Ergonomie de la commande.
- Fiabiliser - Sécuriser - Faciliter la maintenance.
- Changer le bouton d’activation du système
Analyse de l'existant et liens utiles
- Projet initial : [1]
Matériel
- Arduino pro mini (prévoir un adaptateur FTDI ou un Arduino Uno pour téléverser le code)
- DRV8838 (pont en H permettant de commander le moteur DC)
- Batteries Li-on 18650 (x2 : 7.4V pour alimenter le moteur, mais une seule cellule est utilisée pour alimenter l'arduino).
- Un chargeur USB pour 2 cellules (avec connecteur JST XH-3P) d'au moins 2A.
Outils
- Imprimante 3D pour les boitiers
- Fer à souder / Matériel électronique pour réaliser le circuit
- Un PC pour programmer l'Arduino (avec un module FTDI)
Mode d'opération
This setup mean to drive a retractable arm that hold a joystick needed to stir an electrical weelchair. The arm can be retracted/extended to its end positions or stopped inbetween. The system is composed of :
- a push button big enough to be actuated with the head. (temporary contact, normally open)
- an arduino mini pro (atmega328p in its 3.3v version preferably)
- a DC motor H-Bridge driver (DVR 8838) to drive the linear actuator that moves the arm the linear actuator itself, with en of course switches that autmatically open the power circuit when the it reaches its end of course positions
Once assembled, the system works as described :
- a long press will retract the arm
- a double press will extend the arm
- a simple press will stop the arm
The system works on 7.4 Li-Ion battery, but the arduino mini pro is powered by one cell only on its RAW input, to shunt the voltage regulator. You also have to remove the led on the arduino, so it won't draw current during deep sleep. With this setup, we're able to draw 5 uA in deep sleep mode. As the arduino mini pro doesn't have a usb2serial chip, you will have to program it with an external programmer (arduino as isp, ftdi...).
Spécifications du firmware
- Smart push button with actions linked to different press types (short press, long press and double press)
- deep sleep, wake on external interrupt of the push button
- drive DC motor CW or CCW depending on state
- (optional) motor current monitoring via shunt resistor and avr ADC
Fichiers source
Retours utilisateurs
- Après plusieurs mois d'utilisation, Hugo paraît toujours autant ravi de cette V2 du système ! Fiable et robuste, tout fonctionne à merveille et répond à ses besoins.