Différences entre versions de « Projets:Motorisation fauteuil manuel »
(Page créée avec « {{Infobox projet |Description=motorisation d'un fauteuil manuel pour Imène |Porteur de projet=Imene |Fabmanager=Yo |Référent documentation=Delphine, Yo, Imene |Catégor… ») |
|||
| (24 versions intermédiaires par 2 utilisateurs non affichées) | |||
| Ligne 1 : | Ligne 1 : | ||
{{Infobox projet | {{Infobox projet | ||
|Description=motorisation d'un fauteuil manuel pour Imène | |Description=motorisation d'un fauteuil manuel pour Imène | ||
| + | |Evènement associé=Atelier Mobilab 4 du 23 au 29 Novembre 2022 | ||
|Porteur de projet=Imene | |Porteur de projet=Imene | ||
|Fabmanager=Yo | |Fabmanager=Yo | ||
| − | |Référent documentation=Delphine, Yo | + | |Référent documentation=Delphine, Imene, Yo |
|Catégorie de handicap=Mobilité | |Catégorie de handicap=Mobilité | ||
|Mobilité=Hoverchair | |Mobilité=Hoverchair | ||
| Ligne 16 : | Ligne 17 : | ||
}} | }} | ||
== Description du projet == | == Description du projet == | ||
| + | Système permettant la motorisation d'un fauteuil manuel avec direction à l'aide d'un joystick. (""Hoverchair"") | ||
== Cahier des charges == | == Cahier des charges == | ||
| + | * Il faut qu'il respecte les dimensions du fauteuil : Fauteuil Action 4NGXLT DI Largeur d'assise 480mm; Profondeur d'assise 500mm; Hauteur d'assise 485 mm | ||
| + | * Il faut qu'il soit stable pour que le fauteuil ne bascule pas en roulant | ||
| + | * Il faut que je puisse mettre mon appui tête (avec tendeur de dossier marque Invacare réf 40892) et tablette de fauteuil (Tablette ventrale pour fauteuil roulant Invacare) | ||
| + | * Il doit être facile à mettre/enlever par les auxiliaires (sans utiliser d'outillage) | ||
| + | * Le joystick doit être haut pour que je puisse le prendre en main et sans trop de résistance (distance entre le coude et le joystick 29cm) | ||
| + | * Les contrôles de commande (joystick et boutons) doivent être dans le prolongement de mon accoudoir droit car je n'ai pas trop d'amplitude de mouvement | ||
| + | * Cette motorisation me permettra d'avoir une solution de mobilité légère en voiture et en avion de réduire les couts en cas de dommages matériels. | ||
| + | * Il doit avoir une autonomie de 8h, suffisante pour que je puisse voyager sans devoir le recharger trop vite | ||
== Analyse de l'existant et liens utiles== | == Analyse de l'existant et liens utiles== | ||
| + | Il existe un modèle commercialisé par Benoit Systeme qui s'appelle MINOTOR 2.1 et qui coûte environ 6000€. | ||
== Matériel == | == Matériel == | ||
| + | * Deux moteurs de vélo | ||
| + | * Deux contrôleurs de moteurs | ||
| + | * Un Arduino | ||
| + | * Une plaque de support | ||
| + | * Des tubulures carrées : deux pour fixer la plaque de support et deux pour fixer le système de motorisation au fauteuil | ||
| + | * Un bouton arrêt d'urgence | ||
| + | * Un bouton d'arrêt pour l'Arduino | ||
| + | * Un bouton d'arrêt utilisateur au niveau du joystick | ||
| + | * Un contrôleur | ||
| + | * Un convertisseur de 36V en 9V | ||
==Outils== | ==Outils== | ||
| Ligne 28 : | Ligne 49 : | ||
==Fichiers source== | ==Fichiers source== | ||
| + | [[File:Système d'accroche fauteuil.zip]] | ||
| + | |||
| + | [[:File:Shéma_électrique2.svg]] | ||
| + | |||
| + | Code Arduino à rajouter | ||
| + | |||
| + | == Principe de fonctionnement == | ||
| + | |||
| + | Dans le boitier contenant l'Hoverchair il y a : deux ESC qui sont les contrôleurs des moteurs et un Arduino qui permet de piloter la direction et la vitesse des ESC. La batterie alimente les deux contrôleurs mais elle est en 36V donc il faut un convertisseur pour l'Arduino qui lui est en 9V. | ||
| + | Il y a trois interrupteurs : | ||
| + | * L'interrupteur d'urgence qui est juste à coté de la batterie, | ||
| + | * L'interrupteur marche/arrêt pour l'utilisateur, | ||
| + | * L'interrupteur pour débrancher uniquement l'Arduino pour simplifier la maintenance. | ||
| + | Au milieu des deux contrôleurs et au dessus de l'Arduino il y a le Bornier qui permet de brancher tous les fils ensemble. | ||
==Etapes de fabrication pas à pas== | ==Etapes de fabrication pas à pas== | ||
| + | Ce projet s'appuie sur [https://wikilab.myhumankit.org/index.php?title=Projets:HoverChair| la documentation Hoverchair visible sur ce Wiki.] | ||
| + | |||
| + | Pour ce projet, nous avons changé le code Arduino et le schéma électronique. Le nouveau schéma électronique permet de couper le circuit avec l'arrêt d'urgence de manière sécurisée. | ||
| + | |||
| + | |||
| + | === Préparation du support pour le circuit électronique === | ||
| + | * Découper la plaque de dibon aux cotes (voir le schéma de montage du projet) | ||
| + | * Préparer les longueurs de fil adéquates pour faire le montage | ||
| + | |||
| + | === Schéma électronique mis à jour === | ||
| + | |||
| + | [[File:Shéma_électrique2.pdf|700px]] | ||
| + | |||
| + | === Code Arduino mis à jour === | ||
| + | |||
| + | |||
| + | étape 1 | ||
==Retours utilisateurs== | ==Retours utilisateurs== | ||
Version actuelle datée du 30 mai 2023 à 14:31
| Motorisation fauteuil manuel
400pxLa propriété « A image principale » (comme le type de page) avec la valeur d’entrée « File: » contient des caractères non valides ou est incomplète, et donc peut provoquer des résultats inattendus lors d’une requête ou d’un processus d’annotation. | |
|---|---|
| Informations | |
| Description | motorisation d'un fauteuil manuel pour Imène |
| Evènement associé | Atelier Mobilab 4 du 23 au 29 Novembre 2022 |
| Catégorie | Mobilité |
| Sous catégorie mobilité | Hoverchair |
| Etat d'avancement | En cours |
| Techniques | |
| Durée de fabrication | |
| Coût matériel | De 50 à 100 euros |
| Niveau | Difficile |
| Licence | by-sa |
| Date de création | 2022-11-23 |
| Équipe | |
| Porteur de projet | Imene |
| Contributeurs | |
| Fabmanager | Yo |
| Référent documentation | Delphine, Imene, Yo |
| Nom humanlab | Humanlab_MHK |
| Documentation | |
| Statut de la documentation | Partielle |
| Relecture de la documentation | Non vérifiée |
Description du projet
Système permettant la motorisation d'un fauteuil manuel avec direction à l'aide d'un joystick. (""Hoverchair"")
Cahier des charges
- Il faut qu'il respecte les dimensions du fauteuil : Fauteuil Action 4NGXLT DI Largeur d'assise 480mm; Profondeur d'assise 500mm; Hauteur d'assise 485 mm
- Il faut qu'il soit stable pour que le fauteuil ne bascule pas en roulant
- Il faut que je puisse mettre mon appui tête (avec tendeur de dossier marque Invacare réf 40892) et tablette de fauteuil (Tablette ventrale pour fauteuil roulant Invacare)
- Il doit être facile à mettre/enlever par les auxiliaires (sans utiliser d'outillage)
- Le joystick doit être haut pour que je puisse le prendre en main et sans trop de résistance (distance entre le coude et le joystick 29cm)
- Les contrôles de commande (joystick et boutons) doivent être dans le prolongement de mon accoudoir droit car je n'ai pas trop d'amplitude de mouvement
- Cette motorisation me permettra d'avoir une solution de mobilité légère en voiture et en avion de réduire les couts en cas de dommages matériels.
- Il doit avoir une autonomie de 8h, suffisante pour que je puisse voyager sans devoir le recharger trop vite
Analyse de l'existant et liens utiles
Il existe un modèle commercialisé par Benoit Systeme qui s'appelle MINOTOR 2.1 et qui coûte environ 6000€.
Matériel
- Deux moteurs de vélo
- Deux contrôleurs de moteurs
- Un Arduino
- Une plaque de support
- Des tubulures carrées : deux pour fixer la plaque de support et deux pour fixer le système de motorisation au fauteuil
- Un bouton arrêt d'urgence
- Un bouton d'arrêt pour l'Arduino
- Un bouton d'arrêt utilisateur au niveau du joystick
- Un contrôleur
- Un convertisseur de 36V en 9V
Outils
Coût
Fichiers source
Fichier:Système d'accroche fauteuil.zip
{kind=link}
Code Arduino à rajouter
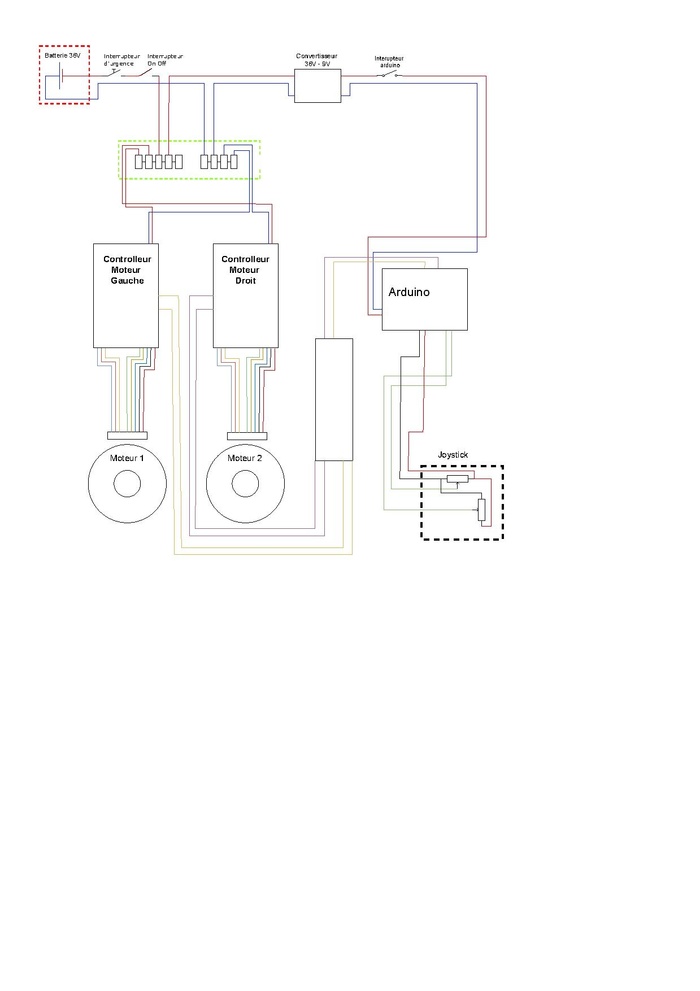
Principe de fonctionnement
Dans le boitier contenant l'Hoverchair il y a : deux ESC qui sont les contrôleurs des moteurs et un Arduino qui permet de piloter la direction et la vitesse des ESC. La batterie alimente les deux contrôleurs mais elle est en 36V donc il faut un convertisseur pour l'Arduino qui lui est en 9V. Il y a trois interrupteurs :
- L'interrupteur d'urgence qui est juste à coté de la batterie,
- L'interrupteur marche/arrêt pour l'utilisateur,
- L'interrupteur pour débrancher uniquement l'Arduino pour simplifier la maintenance.
Au milieu des deux contrôleurs et au dessus de l'Arduino il y a le Bornier qui permet de brancher tous les fils ensemble.
Etapes de fabrication pas à pas
Ce projet s'appuie sur la documentation Hoverchair visible sur ce Wiki.
Pour ce projet, nous avons changé le code Arduino et le schéma électronique. Le nouveau schéma électronique permet de couper le circuit avec l'arrêt d'urgence de manière sécurisée.
Préparation du support pour le circuit électronique
- Découper la plaque de dibon aux cotes (voir le schéma de montage du projet)
- Préparer les longueurs de fil adéquates pour faire le montage
Schéma électronique mis à jour
Code Arduino mis à jour
étape 1