Différences entre versions de « Projets:HoverChair - Version Carte HoverBoard »
| (42 versions intermédiaires par 2 utilisateurs non affichées) | |||
| Ligne 1 : | Ligne 1 : | ||
| − | + | {{Infobox projet | |
| + | |Image principale=Proto.png | ||
| + | |Description=Motoriser un fauteuil roulant en faisant entraîner les roues grâce au frottement entre des moteurs d'hoverboard et les roues. | ||
| + | |Porteur de projet=Michel | ||
| + | |Contributeurs=SulianeMHK, Yobi | ||
| + | |Fabmanager=Yo | ||
| + | |Référent documentation=Yo | ||
| + | |Catégorie de handicap=Mobilité | ||
| + | |Mobilité=Hoverchair,Motorisation fauteuil | ||
| + | |Etat d'avancement=Réalisés | ||
| + | |Statut de la documentation=Complète | ||
| + | |Relecture de la documentation=Non vérifiée | ||
| + | |Techniques=mécanique, soudure, électronique | ||
| + | |Licence=by-sa | ||
| + | |Projet date=2020-06-10 | ||
| + | |Nom humanlab=Humanlab_MHK | ||
| + | }} | ||
| + | == MISE EN GARDE == | ||
| + | |||
| + | * Ce projet nécessite beaucoup de compétences diverses et variées et des réglages fins. | ||
| + | |||
| + | * Lors de la mise en place d'une carte mère d'hoverboard, il a la possibilité de se tromper de valeur, cela peut engendrer des comportements brusques et dangereux du véhicule. | ||
| + | |||
| + | * Il y a des modifications à faire sur la carte mère, il y a un risque de la rendre inutilisable. | ||
| + | |||
| + | * Les moteurs d'hoverboard sont puissants (350W) MEFIEZ-VOUS !!! | ||
| + | |||
| + | *'''<big>Ces opérations bien que documentés ne sont pas adaptés aux débutants</big>''' | ||
| + | |||
| + | * Nous sommes en train de refaire ce projet de manière plus accessible avec un Arduino et des contrôleurs E-bike de vélo. | ||
| + | [https://wikilab.myhumankit.org/index.php?title=Projets:HoverChair_-_Version_Arduino_et_contr%C3%B4leur_Ebike HoverChair_-_Version_Arduino_et_contr%C3%B4leur_Ebike] | ||
== Description du projet == | == Description du projet == | ||
| − | Le projet consiste à utiliser des moteurs d'un | + | Le projet consiste à utiliser des moteurs d'un hoverboard pour motoriser un fauteuil roulant en faisant entraîner les roues grâce au frottement entre les moteurs et les roues. |
| + | |||
| + | C'est le principe de friction d'un galet sur une roue comme pour les solex | ||
| + | |||
| + | [https://www.solex-motobecane.com/images_documents/s1_34_4b859428ee133_solex_prototype_23_couvercle_galet.jpg galet] | ||
| + | |||
| + | |||
Pour voir le prototype en action : [https://fr-fr.facebook.com/MyHumanKit/videos/776950076180793/ HoverChair] | Pour voir le prototype en action : [https://fr-fr.facebook.com/MyHumanKit/videos/776950076180793/ HoverChair] | ||
| Ligne 12 : | Ligne 48 : | ||
== Cahier des charges == | == Cahier des charges == | ||
| − | * | + | Le système : |
| − | * | + | |
| + | * Doit pouvoir mouvoir un fauteuil roulant manuel. | ||
| + | * Doit être amovible le plus facilement possible. | ||
| + | * Doit être étanche. | ||
| + | * Doit être pilotable grâce à différentes solutions : Joystick, télécommande, téléphone etc. | ||
| + | * Doit être configurable au niveau de l'accélération et de la vitesse. | ||
== Analyse de l'existant == | == Analyse de l'existant == | ||
| Ligne 19 : | Ligne 60 : | ||
* [https://benoitsystemes.com/minotor2-1.php minotor 2.1] | * [https://benoitsystemes.com/minotor2-1.php minotor 2.1] | ||
| − | == | + | == Equipe (Porteur de projet et contributeurs) == |
| − | + | * Porteurs du projet : Michel | |
| + | * Concepteurs/contributeurs : Gaël, Suliane, DD, NicoP | ||
| + | * Fabmanager référent : Yo | ||
| + | * Responsable de documentation : Yo | ||
| − | + | == Matériel nécessaire == | |
| − | + | * Connecteurs mâle de PCB | |
| + | * Fils électrique | ||
| + | * Un hoverboard fonctionnel | ||
| + | * Du profilé acier en 20*30 mm | ||
| − | + | '''Matériel nécessaire au flashage de la carte mère d'hoverboard:''' | |
| − | [https:// | + | * Une clé usb [https://www.st.com/en/development-tools/st-link-v2.html st-link-v2] [https://fr.aliexpress.com/item/1827010981.html?aff_platform=true&isdl=y&src=bing Ou un clone chinois] |
| + | * Le logiciel STM32 ST-LINK utility V4.5.0: [https://www.st.com/en/development-tools/stsw-link004.html development-tools ST Link] | ||
| + | * Adaptateur USB-série (facultatif mais utile pour calibration ADC) | ||
| − | + | ==Outils nécessaires== | |
| + | |||
| + | * Outillage classique | ||
| + | * Fer à souder + étain | ||
| + | * Multimètre | ||
| + | * Poste de soudure à l'arc + baguettes | ||
| + | |||
| + | |||
| + | ==Précisions sur le fonctionnement du système== | ||
| + | |||
| + | * Il y a deux moteurs électriques qui doivent être synchronisés pour fonctionner simultanément. Le tableau ci-dessous décrit les différentes phases de fonctionnement. | ||
| + | |||
| + | * Le moteur 1 est à gauche et le moteur 2 est à droite | ||
| + | |||
| + | * Horaire = le moteur tourne dans le sens vers l'avant | ||
| + | |||
| + | * Anti-horaire = le moteur tourne dans le sens vers l'arrière | ||
| + | |||
| + | {| class="wikitable" | ||
| + | |+ Texte de la légende | ||
| + | |- | ||
| + | ! Moteur 1 !! Moteur 2 !! Résultat | ||
| + | |- | ||
| + | | 0 Tr/min || 0 Tr/min || Le véhicule est à l'arrêt | ||
| + | |- | ||
| + | | Horaire || Horaire || Le véhicule avance | ||
| + | |- | ||
| + | | Horaire || 0 Tr/min || Le véhicule tourne sur la droite | ||
| + | |- | ||
| + | | 0 Tr/min || Horaire || Le véhicule tourne sur la gauche | ||
| + | |- | ||
| + | | Anti-horaire || Anti-horaire || Le véhicule recule | ||
| + | |- | ||
| + | | Anti-horaire || 0 Tr/min || Le véhicule recule et tourne vers la droite | ||
| + | |- | ||
| + | | 0 Tr/min || Anti-horaire || Le véhicule recule et tourne vers la gauche | ||
| + | |} | ||
| + | |||
| + | |||
| + | ==Précisions sur le(s) contrôleur(s)== | ||
| + | |||
| + | Plusieurs possibilités s'offre à nous pour contrôler les moteurs | ||
| + | |||
| + | * ''' Utiliser la carte d'origine d'un hoverboard''' -->> C'est ce tutoriel <<-- | ||
| + | |||
| + | Avantages : | ||
| + | |||
| + | 1 - Il y a 2 circuits de puissance, un par moteur, donc avec une seule carte on peut contrôler les deux moteurs | ||
| + | |||
| + | 2 - On peut mettre différentes solutions pour l'accélérateur : Joystick, autonome, télécommande ... | ||
| + | |||
| + | 3 - Trouvable sur des site à pas cher [https://hover-store.fr/boutique/accessoires-pour-la-mobilite-urbaine/accessoires-hoverboard/carte-mere-pour-hoverboard/ https://hover-store.fr/ 40€] | ||
| + | |||
| + | Inconvénients : | ||
| + | |||
| + | 1 - Il faut reprogrammer la carte mère = flasher son firmware. | ||
| + | |||
| + | 2 - Il faut ajouter un connecteurs sur la carte mère | ||
| + | |||
| + | |||
| + | * '''Utiliser deux cartes VESC synchronisées ensemble''' -->> NON Testé <<-- | ||
| + | |||
| + | |||
| + | Avantages : | ||
| + | |||
| + | 1 - On peut mettre différentes solutions pour l'accélérateur : Joystick, autonome, télécommande ... | ||
| + | |||
| + | 2 - Elle est complètement configurable : Vitesse, accélération ... | ||
| + | |||
| + | Inconvénients : | ||
| + | |||
| + | 1 - Il faut programmer la carte mère = flasher son firmware. | ||
| + | |||
| + | 2 - Elle est entierement configurable : De très nombreuses possibilités de configuration... | ||
| + | |||
| + | 3 - Elle coûte entre 80 et 100€ et il en faut deux (Une carte par moteur) | ||
| + | |||
| + | 4 - Il faut créer des connecteurs au pas de 2mm | ||
| + | |||
| + | |||
| + | * '''Utiliser deux contrôleurs lowcost E-Bike''' -->> Le tutoriel est en cours d'écriture <<-- [https://wikilab.myhumankit.org/index.php?title=Projets:HoverChair_-_Version_Arduino_et_contr%C3%B4leur_Ebike HoverChair_-_Version_Arduino_et_contr%C3%B4leur_Ebike] | ||
| + | |||
| + | |||
| + | Avantages : | ||
| + | |||
| + | 1 - Faible coût : environ 10€ | ||
| + | |||
| + | 2 - Facile à mettre en œuvre | ||
| + | |||
| + | |||
| + | Inconvénients : | ||
| + | |||
| + | 1 - Le système fonctionne soit en marche avant soit en marche arrière (Il faut ajouter un bouton pour inverser le sens de rotation des moteurs) | ||
| + | |||
| + | 2 - Il faut ajouter un Arduino pour répartir la tension de commande aux 2 contrôleurs. Par exemple lors d'un virage à droite, le moteur gauche doit tourner plus vite que le moteur droit. | ||
| + | |||
| + | ==Précisions sur les moteurs== | ||
| + | |||
| + | * Il n'est pas possible d'utiliser les moteurs de vélo à assistance ou trottinette électrique pour ce projet ! | ||
| + | |||
| + | Car, ils sont conçus avec une roue libre [https://fr.wikipedia.org/wiki/Roue_libre Définition_de_la_Roue_libre] | ||
| + | |||
| + | Ce qui veut dire qu'il ne peuvent pas entraîner le véhicule en arrière. | ||
| + | |||
| + | * Seul les moteurs d'hoverboard sont à entraînement direct et donc peuvent aller d'avant en arrière. | ||
| + | |||
| + | * Bon, ... :) je tiens quand même à préciser que notre cher DD à réussi à démonter un moteur et à souder la roue libre afin de lui donner la possibilité d’entraîner le véhicule dans les deux sens.... | ||
| − | + | Mais bon, c'est pas à la portée du premier venu ... | |
| − | + | ==Poignée de gaz== | |
| − | |||
| − | |||
| − | |||
| − | + | * '''Wiichuck''' | |
| − | + | Lorsque l'on utilise une wiichuck pour la poignée, il est parfois difficile de s'en sortir avec un code couleur des fils du connecteur qui change avec chaque manette ... | |
| − | + | Un outil peut être pratique : [https://www.gotronic.fr/art-adaptateur-wiichuck-dfr0062-19308.htm#complte_desc Adaptateur wiichuck] | |
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | + | [[File:ar-adaptateur-wiichuck-dfr0062-19308.jpeg|400px]] | |
| − | |||
| − | |||
| − | |||
| − | + | Plus d'infos sur ledit adaptateur : [https://todbot.com/blog/2008/02/18/wiichuck-wii-nunchuck-adapter-available/ wiichuck] | |
| − | ==Schémas== | + | ==Schémas électronique== |
| − | + | * '''Schéma du fonctionnement électronique VESC''' | |
Source: [https://vesc-project.com/ Vesc-Project] | Source: [https://vesc-project.com/ Vesc-Project] | ||
| Ligne 68 : | Ligne 210 : | ||
[[File:Fonctionnement électronique.png|700px]] | [[File:Fonctionnement électronique.png|700px]] | ||
| − | |||
| − | [[File: | + | *'''Schéma de connecteurs de la carte mère d'hoverBoard''' |
| + | |||
| + | Il existe différents modèles de carte mère, le tableau suivant en recense une partie : [https://docs.google.com/spreadsheets/d/1Vs3t2W8_z7E93Ij0pwx_cKzxzKSvjW1n1t_40CXV3ik/edit#gid=0 Modèle de carte mère] | ||
| + | |||
| + | [[File:Connecteurs carte mère HoverBoard.jpg|700px]] | ||
| − | + | * '''Schéma global avec une carte mère d'hoverboard''' | |
| − | + | [[File:Shéma Hoverboard poignée de gaz.pdf|700px| Schéma global avec carte mère d'hoverboard]] | |
| − | + | ==Partie électronique== | |
| − | + | * '''Connecteurs électriques''' | |
| − | + | [https://www.amazon.com/OCR-Waterproof-Electrical-Connectors-Automotive/dp/B07VK46YYT/ref=sr_1_11?_encoding=UTF8&c=ts&dchild=1&keywords=Automotive+Replacement+Ignition+Plug+Connectors&qid=1611328424&s=automotive&sr=1-11&ts_id=15729341 Waterproof-Electrical-Connectors-Automotive] | |
| − | + | ==Partie mécanique== | |
| − | + | Notre proto est partie avec le fauteuil de rugby de Wally Salvan et la ligue de rugby à 7 ... | |
| − | + | [[File:Chassis + installation.jpeg|400px]] | |
| − | [ | + | [[File:Vue de dessus.jpeg|400px]] |
| − | [[File: | + | [[File:Chassis Wally.jpg|400px]] |
==Coût== | ==Coût== | ||
| + | |||
| + | ==A PARTIR D'ICI LA DOC N'EST PLUS A JOUR== | ||
| + | |||
| + | C'est en cours, merci de patienter !!! :) | ||
==Délai estimé== | ==Délai estimé== | ||
| Ligne 288 : | Ligne 437 : | ||
== Fichiers source == | == Fichiers source == | ||
| − | |||
| − | |||
== Ressources == | == Ressources == | ||
| − | |||
| − | ''' | + | <big>'''sites qui ont servi au projet:'''</big> |
| + | |||
| + | * [https://cyclurba.fr/ Le site cyclurba] | ||
| + | |||
| + | * [https://github.com/mpstlvc/Hack_Hoverboard Hack_Hoverboard] de Mickaël du [http://lab-origami.fr/ lab-origami] | ||
| + | |||
| + | * [https://pionierland.de/hoverhack/ Compilation de code en ligne] | ||
| + | |||
| + | * Il existe des cartes mère avec une puce AT32 au lieu de STM32 dans ce cas : [https://github.com/TomTinkering/hoverboard-firmware-hack/tree/at32_master at32_master] | ||
| + | |||
| + | * [https://cyclurba.fr/forum/631051/hacking-hoverboard.html?from=1011&discussionID=24851&messageID=631051&rubriqueID=84&pageprec= Informations complémentaires] | ||
| + | |||
| + | * La Bible du proto façon Tchangly21: | ||
| + | https://cyclurba.fr/forum/541348/bible-proto-fan-on-tchang-trucs-astuces-liste-d-achats.html?discussionID=21555 | ||
| + | |||
| + | * Tuto en français efficace de hack carte mère pour être commander avec un Nunchuck: | ||
| + | https://lab-origami.github.io/Hack_Hoverboard/ | ||
| − | + | * Github pour le firmware pour hack carte mère d'hoverboard avec µc STM32F103: | |
| − | https://github.com/NiklasFauth/hoverboard-firmware-hack/ | + | * Hoverboard avec 1 seule carte mère : https://github.com/NiklasFauth/hoverboard-firmware-hack/ |
| − | + | * Github pour le firmware pour hack carte mère d'hoverboard avec µc GD32F130C8: | |
| − | Hoverboard avec 2 cartes mère, chacune commandant un moteur. | + | Hoverboard avec 2 cartes mère, chacune commandant un moteur. |
https://github.com/flo199213/Hoverboard-Firmware-Hack-Gen2 | https://github.com/flo199213/Hoverboard-Firmware-Hack-Gen2 | ||
| + | |||
| + | |||
| + | <big>'''Vidéos:'''</big> | ||
| + | |||
| + | |||
| + | Vidéo explicative du branchement de la carte mère avec la nunchuck des consoles Wii : https://www.youtube.com/watch?v=VAqcnC1M06A | ||
'''Hack Carte mère''' | '''Hack Carte mère''' | ||
| Ligne 412 : | Ligne 580 : | ||
<br /> | <br /> | ||
'''<big>Texte:</big>'''<br /> | '''<big>Texte:</big>'''<br /> | ||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
<br /> | <br /> | ||
Version actuelle datée du 18 novembre 2024 à 11:48
| HoverChair - Version Carte HoverBoard
| |
|---|---|
| Informations | |
| Description | Motoriser un fauteuil roulant en faisant entraîner les roues grâce au frottement entre des moteurs d'hoverboard et les roues. |
| Catégorie | Mobilité |
| Sous catégorie mobilité | Hoverchair Motorisation fauteuil |
| Etat d'avancement | Réalisés |
| Techniques | mécanique, soudure, électronique |
| Durée de fabrication | |
| Coût matériel | |
| Niveau | |
| Licence | by-sa |
| Date de création | 2020-06-10 |
| Équipe | |
| Porteur de projet | Michel |
| Contributeurs | SulianeMHK, Yobi |
| Fabmanager | Yo |
| Référent documentation | Yo |
| Nom humanlab | Humanlab_MHK |
| Documentation | |
| Statut de la documentation | Complète |
| Relecture de la documentation | Non vérifiée |
MISE EN GARDE
- Ce projet nécessite beaucoup de compétences diverses et variées et des réglages fins.
- Lors de la mise en place d'une carte mère d'hoverboard, il a la possibilité de se tromper de valeur, cela peut engendrer des comportements brusques et dangereux du véhicule.
- Il y a des modifications à faire sur la carte mère, il y a un risque de la rendre inutilisable.
- Les moteurs d'hoverboard sont puissants (350W) MEFIEZ-VOUS !!!
- Ces opérations bien que documentés ne sont pas adaptés aux débutants
- Nous sommes en train de refaire ce projet de manière plus accessible avec un Arduino et des contrôleurs E-bike de vélo.
HoverChair_-_Version_Arduino_et_contr%C3%B4leur_Ebike
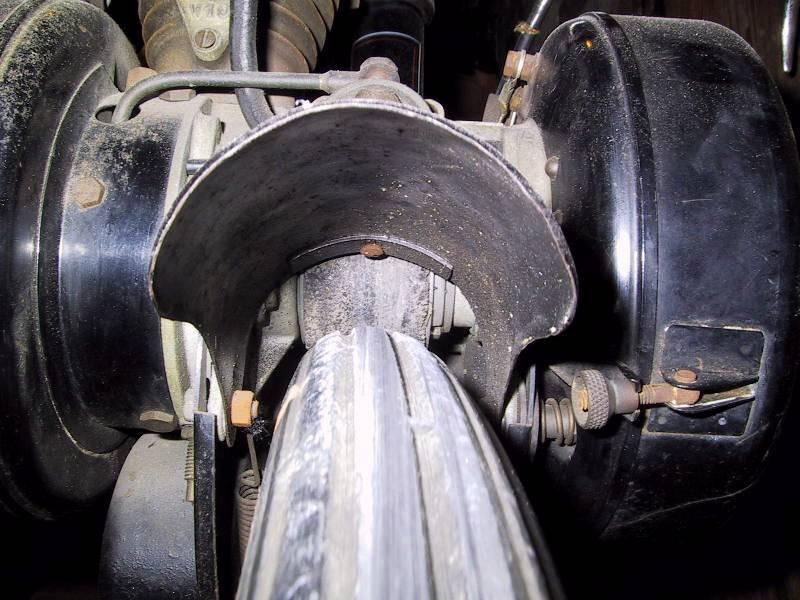
Description du projet
Le projet consiste à utiliser des moteurs d'un hoverboard pour motoriser un fauteuil roulant en faisant entraîner les roues grâce au frottement entre les moteurs et les roues.
C'est le principe de friction d'un galet sur une roue comme pour les solex
{kind=link}
Pour voir le prototype en action : HoverChair

Cahier des charges
Le système :
- Doit pouvoir mouvoir un fauteuil roulant manuel.
- Doit être amovible le plus facilement possible.
- Doit être étanche.
- Doit être pilotable grâce à différentes solutions : Joystick, télécommande, téléphone etc.
- Doit être configurable au niveau de l'accélération et de la vitesse.
Analyse de l'existant
Equipe (Porteur de projet et contributeurs)
- Porteurs du projet : Michel
- Concepteurs/contributeurs : Gaël, Suliane, DD, NicoP
- Fabmanager référent : Yo
- Responsable de documentation : Yo
Matériel nécessaire
- Connecteurs mâle de PCB
- Fils électrique
- Un hoverboard fonctionnel
- Du profilé acier en 20*30 mm
Matériel nécessaire au flashage de la carte mère d'hoverboard:
- Une clé usb st-link-v2 Ou un clone chinois
- Le logiciel STM32 ST-LINK utility V4.5.0: development-tools ST Link
- Adaptateur USB-série (facultatif mais utile pour calibration ADC)
Outils nécessaires
- Outillage classique
- Fer à souder + étain
- Multimètre
- Poste de soudure à l'arc + baguettes
Précisions sur le fonctionnement du système
- Il y a deux moteurs électriques qui doivent être synchronisés pour fonctionner simultanément. Le tableau ci-dessous décrit les différentes phases de fonctionnement.
- Le moteur 1 est à gauche et le moteur 2 est à droite
- Horaire = le moteur tourne dans le sens vers l'avant
- Anti-horaire = le moteur tourne dans le sens vers l'arrière
| Moteur 1 | Moteur 2 | Résultat |
|---|---|---|
| 0 Tr/min | 0 Tr/min | Le véhicule est à l'arrêt |
| Horaire | Horaire | Le véhicule avance |
| Horaire | 0 Tr/min | Le véhicule tourne sur la droite |
| 0 Tr/min | Horaire | Le véhicule tourne sur la gauche |
| Anti-horaire | Anti-horaire | Le véhicule recule |
| Anti-horaire | 0 Tr/min | Le véhicule recule et tourne vers la droite |
| 0 Tr/min | Anti-horaire | Le véhicule recule et tourne vers la gauche |
Précisions sur le(s) contrôleur(s)
Plusieurs possibilités s'offre à nous pour contrôler les moteurs
- Utiliser la carte d'origine d'un hoverboard -->> C'est ce tutoriel <<--
Avantages :
1 - Il y a 2 circuits de puissance, un par moteur, donc avec une seule carte on peut contrôler les deux moteurs
2 - On peut mettre différentes solutions pour l'accélérateur : Joystick, autonome, télécommande ...
3 - Trouvable sur des site à pas cher https://hover-store.fr/ 40€
Inconvénients :
1 - Il faut reprogrammer la carte mère = flasher son firmware.
2 - Il faut ajouter un connecteurs sur la carte mère
- Utiliser deux cartes VESC synchronisées ensemble -->> NON Testé <<--
Avantages :
1 - On peut mettre différentes solutions pour l'accélérateur : Joystick, autonome, télécommande ...
2 - Elle est complètement configurable : Vitesse, accélération ...
Inconvénients :
1 - Il faut programmer la carte mère = flasher son firmware.
2 - Elle est entierement configurable : De très nombreuses possibilités de configuration...
3 - Elle coûte entre 80 et 100€ et il en faut deux (Une carte par moteur)
4 - Il faut créer des connecteurs au pas de 2mm
- Utiliser deux contrôleurs lowcost E-Bike -->> Le tutoriel est en cours d'écriture <<-- HoverChair_-_Version_Arduino_et_contr%C3%B4leur_Ebike
Avantages :
1 - Faible coût : environ 10€
2 - Facile à mettre en œuvre
Inconvénients :
1 - Le système fonctionne soit en marche avant soit en marche arrière (Il faut ajouter un bouton pour inverser le sens de rotation des moteurs)
2 - Il faut ajouter un Arduino pour répartir la tension de commande aux 2 contrôleurs. Par exemple lors d'un virage à droite, le moteur gauche doit tourner plus vite que le moteur droit.
Précisions sur les moteurs
- Il n'est pas possible d'utiliser les moteurs de vélo à assistance ou trottinette électrique pour ce projet !
Car, ils sont conçus avec une roue libre Définition_de_la_Roue_libre
Ce qui veut dire qu'il ne peuvent pas entraîner le véhicule en arrière.
- Seul les moteurs d'hoverboard sont à entraînement direct et donc peuvent aller d'avant en arrière.
- Bon, ... :) je tiens quand même à préciser que notre cher DD à réussi à démonter un moteur et à souder la roue libre afin de lui donner la possibilité d’entraîner le véhicule dans les deux sens....
Mais bon, c'est pas à la portée du premier venu ...
Poignée de gaz
- Wiichuck
Lorsque l'on utilise une wiichuck pour la poignée, il est parfois difficile de s'en sortir avec un code couleur des fils du connecteur qui change avec chaque manette ...
Un outil peut être pratique : Adaptateur wiichuck

Plus d'infos sur ledit adaptateur : wiichuck
Schémas électronique
- Schéma du fonctionnement électronique VESC
Source: Vesc-Project

- Schéma de connecteurs de la carte mère d'hoverBoard
Il existe différents modèles de carte mère, le tableau suivant en recense une partie : Modèle de carte mère

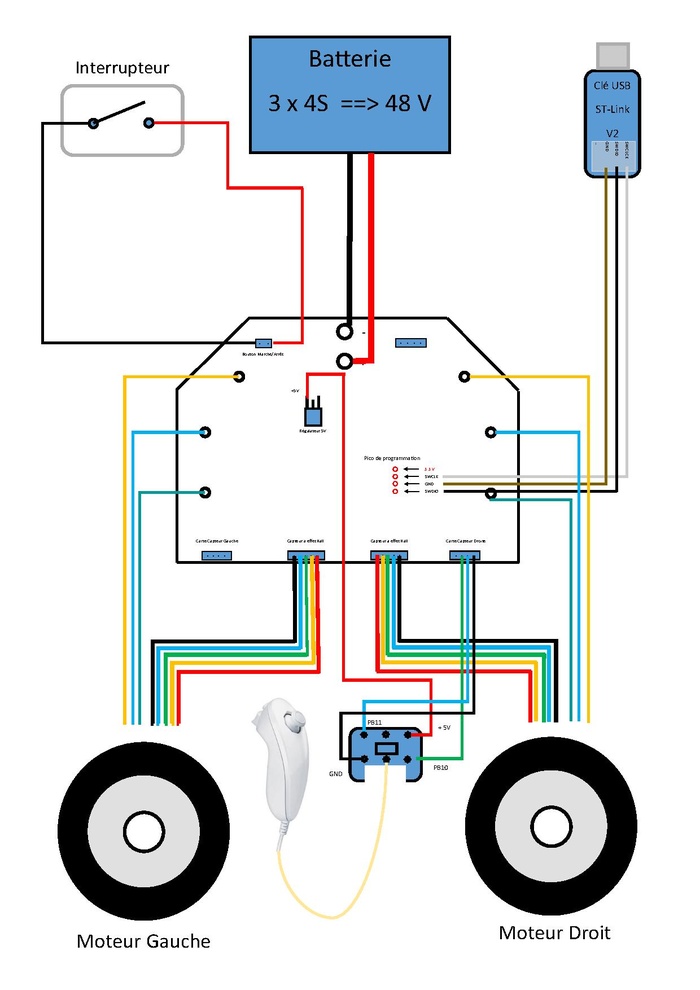
- Schéma global avec une carte mère d'hoverboard
Partie électronique
- Connecteurs électriques
Waterproof-Electrical-Connectors-Automotive
Partie mécanique
Notre proto est partie avec le fauteuil de rugby de Wally Salvan et la ligue de rugby à 7 ...



Coût
A PARTIR D'ICI LA DOC N'EST PLUS A JOUR
C'est en cours, merci de patienter !!! :)
Délai estimé
Étapes de fabrication pas à pas
Les grande étapes :
1 - Démontage de l'hoverboard ou achat d'une carte mère nue : Lien aliexpress
2 - Récupération des sources/fichiers sur le site github.
3 - Modifications et compilation des sources pour faire correspondre le programme à votre projet, par exemple type de poignée, vitesse maximale etc.
4 - Flashage de la puce (Définition : En matière informatique, le terme ' flasher ' signifie tout simplement mettre à jour son matériel, de même qu'il vous arrive de mettre à jour Windows ou un logiciel. Mais, pour un matériel, c'est plus délicat puisqu'il s'agit d'une mise à jour du firmware, un petit programme intégré sur une puce de mémoire que l'on trouve dans les périphériques micro-informatiques et les appareils high-tech)
Source : https://www.01net.com/actualites/flasher-cest-quoi-325253.html
5 - Remontage : rebrancher les éléments (contrôleur/accélérateur/moteur) sur la carte.
Étapes détaillées :
1.1 - Démontage de l'hoverboard ou achat d'une carte mère nue : Lien aliexpress
2.1 - Récupérer les sources du hack de l'hoverboard ici : Firmware Hack
2.2 - Cliquer sur l’icône verte "code", puis download zip
2.3 - Dé-zipper/extraire le contenu du dossier dans un emplacement de votre choix.
3.1 - To Do A tester : Compilation en ligne
4.1 - Pour pouvoir flasher il faut connecter la carte mère de l’hoverboard sur le PC grâce à une clé ST-Link, trouvable par ex ici : ST Link V2
4.2 - Souder 3 connecteurs de PCB mâle à l’emplacement « Interface de programmation » par exemple : Connecteur droit simple rangée
Photo : connecteur non soudés
Photo : connecteur soudés
4.3 - Relier la clé ST link V2 à l'emplacement "interface de programmation" sur la carte mère grâce à trois fils dupont femelle/femelle par ex ici : Fils dupont Femelle/Femelle
4.3.1 - Coté Clé ST Link V2
SWDIO => fil bleu
GND => fil noir
SWCLK => fil jaune

4.3.2 - Coté carte mère

4.4 - Brancher la batterie à l'aide du connecteur XT60
4.5 - Lancer le logiciel STM32 ST-LINK Utility trouvable ici : ST Link Utility
4.6 - Appuyer sur le bouton “Marche” de l’hoverboard et NE PAS LE RELACHER avant la fin de l’étape de flashage (Vous pouvez aussi shunter le bouton avec un fil dupont)
4.7 - Brancher la clé ST-Link sur un port USB de l’ordinateur. Si c’est la première fois que vous branchez votre ST-LinkV2 il faut attendre un peu pour qu’il soit reconnu par Windows.
4.8 - Si c’est la 1ère fois que vous flashez votre carte, il faudra désactiver la protection. Si vous ne faites pas cette étape, vous aurez un message d’erreur 6.1 Pour cela il faut ouvrir le menu Target, puis Options Bytes et mettre Read Out Protection sur Disable puis cliquez sur Apply.


4.9 - Maintenant que la protection est enlevée, nous pouvons nous connecter sur la carte en cliquant sur Target puis Connect

4.10 - Nous pouvons à présent choisir le nouveau firmware à transférer dans la mémoire du micro contrôleur en cliquant sur Target puis Program and Verify

4.11 - Allez chercher le fichier à l'emplacement que vous avez choisi.
4.12 - La fenêtre suivante doit s’ouvrir

4.13 - Cliquez sur Start. S’assurer que la case Verify while programming est bien cochée ainsi que Reset after programming
4.14 - Lorsque le flashage est terminé et si tout s’est bien passé, vous devriez entendre une petite mélodie sur le buzzer de la carte principale de l’hoverboard
4.15 - Vous pouvez alors cliquer sur Target puis Disconnect, débrancher la clé ST-Link et débrancher la batterie
A classer

Prévoir schémas de câblage et photo du logiciel ST link
2 - Démonter la carte mère du refroidisseur. Dévisser les vis cruciformes.
3 - Souder 3 connecteurs droits mâle à l’emplacement « Interface de programmation » dans l’image ci-dessous.
4 - Remonter la carte mère sur refroidisseur
5 - Récupérer les sources , ici: [[1]]
6 - Modification des valeurs du fichier config.h
7 - Compiler les sources
7.1 - Pour compiler vous devrez utilisez un ordi sous linux (Si vous savez le faire avec Windows, merci de nous contacter sur "contact@myhumankit.org"
- Installer l’utilitaire de flashage
- Flasher le fichier précédemment compilé sur la carte principale
1-Démontage de l'hoverboard
Avant de passer a la prochaine étape , nous allons prendre des photos de l hoverboard démonté, pour retrouvé au cas ou les bons branchements. ;)
Débranché les câbles, en premier celui de la batterie, cela réduira les risques de court circuit (tournevis, chaine, etc....) sur les composants de la carte mère.
Faite passer les câbles du 2eme moteur a travers l'axe de l'hoverboard
2-Démontage de la carte mère:
Pour plus de simplicité nous allons démonté la carte mère avec son support de refroidissement:
Dévisser les 4 vis de support de la carte mère, et retirer la carte mère de l'hoverboard.
Voici la carte mère avec ces connecteurs: image
3-Souder 4 connecteurs de PCB mâle
Les cartes mère d'hoverboard disposent de connecteur pour le flashage, souder 4 connecteurs sur l'interface de programmation, voir photo!:
image
zoom image
zoom zoom image
Image avec connecteur souder
4-Remonter la carte avec son refroidissement sur l'hoverboard.
5-Récupérer les sources
le firmware pour contrôler l'hoverboard avec une poignée de gaz, déja compiler en pièce jointe, de la réponse 242:
https://electrotransport.ru/ussr/index.php?topic=35544.msg1432507#msg1432507
le firmware pour contrôler l'hoverboard avec un joystick analogique
le firmware pour contrôler l'hoverboard avec une manette WI Nunchuck
le firmware pour contrôler l'hoverboard avec une radio commandé
6Compiler les sources
- Mettre en place l’environnement sous Windows 10
- Compilation
7-Télécharger et installer le programme de flashage de la carte mère "STM32 ST-LINK utility ", trouvable ici:
https://www.st.com/en/development-tools/stsw-link004.html
- Flasher le fichier précédemment compilé sur la carte principale
Clignotant
N'alimentez pas la carte mère à partir du 3,3 V de votre programmeur! Cela a déjà tué plusieurs cartes mères.
Assurez-vous de maintenir le bouton d'alimentation ou de connecter un cavalier aux broches du bouton d'alimentation pendant le flashage du micrologiciel, car la STM peut libérer le loquet d'alimentation et s'éteindre pendant le flashage. La batterie> 36V doit être connectée pendant le clignotement.
Pour flasher le STM32, utilisez l'utilitaire ST-Flash (https://github.com/texane/stlink).
Fichiers source
Ressources
sites qui ont servi au projet:
- Hack_Hoverboard de Mickaël du lab-origami
- Il existe des cartes mère avec une puce AT32 au lieu de STM32 dans ce cas : at32_master
- La Bible du proto façon Tchangly21:
- Tuto en français efficace de hack carte mère pour être commander avec un Nunchuck:
https://lab-origami.github.io/Hack_Hoverboard/
- Github pour le firmware pour hack carte mère d'hoverboard avec µc STM32F103:
- Hoverboard avec 1 seule carte mère : https://github.com/NiklasFauth/hoverboard-firmware-hack/
- Github pour le firmware pour hack carte mère d'hoverboard avec µc GD32F130C8:
Hoverboard avec 2 cartes mère, chacune commandant un moteur.
https://github.com/flo199213/Hoverboard-Firmware-Hack-Gen2
Vidéos:
Vidéo explicative du branchement de la carte mère avec la nunchuck des consoles Wii : https://www.youtube.com/watch?v=VAqcnC1M06A
Hack Carte mère
Comment hacker une carte mère de hoverboard part1 :
https://www.youtube.com/watch?v=hxwh_wvMX74&t=1s
Hacking carte mère hoverboard en PPM part 2 :
https://www.youtube.com/watch?v=5QavWOvY96E
Teste hack hoverboard / poignée de gaz :
https://www.youtube.com/watch?v=9X0APky8eqM
Hacking hoverboard wii :
https://www.youtube.com/watch?v=VAqcnC1M06A
Fauteuil électrique hacking hoverboard Wii :
https://www.youtube.com/watch?v=PVKy1dtgP6U
Teste pour hacker le hoverboard / RC :
https://www.youtube.com/watch?v=BZkosggoD98&t=1s
Commande :
Exemple des differente possibilité de commander les hoverboard, (2 potentiometres, arduino, manette usb playstation, etc...)
https://www.youtube.com/watch?v=IqbOqwOy8ns
Piloter à distance un contrôleur é-bike :
https://www.youtube.com/watch?v=3i7roO6ZbgQ
Comment teste les capteurs hall :
https://www.youtube.com/watch?v=5j589pXLmR0
Câblage d'une poignée de gaz é-bike :
https://www.youtube.com/watch?v=0LLbGBpqk1Q
Teste signale accélérateur +5v :
https://www.youtube.com/watch?v=8uWVnGdGbp0
Chariot rc teste :
https://www.youtube.com/watch?v=3PHOMe9tKsA
Synchroniser les capteurs hall :
https://www.youtube.com/watch?v=5nHnQ0QgdsU
Comment tester une poignée de gaz hall :
https://www.youtube.com/watch?v=VyRYMDHlmDg
Piloter 2 moteurs avec une seul poignet gaz :
https://www.youtube.com/watch?v=YEwvE78AJSE
Moteur :
Choix moteur alternateur ou moteur hoverboard :
https://www.youtube.com/watch?v=G8NMbvDHbls
Modifier le couplage moteur hoverboard part 1 :
https://www.youtube.com/watch?v=qG8b6QkTnCU&t=929s
Modifier le couplage moteur hoverboard part 2 :
https://www.youtube.com/watch?v=P6iGSc3aIrk&t=7s
Contrôleur :
Modifier la puissance du contro :
https://www.youtube.com/watch?v=Klibcn7qEjY
Teste du contro e-bike 36v/48v 350w :
https://www.youtube.com/watch?v=iyWy8ET6Zmk
Bridage contrôleur é-bike :
https://www.youtube.com/watch?v=u-0FS1TSV4s&t=254s
Montage contrôleur en parallèle part 1 échec :
https://www.youtube.com/watch?v=9UNNNv6zYyQ
Montage contrôleur en parallèle part 2 réussit :
https://www.youtube.com/watch?v=LwlFBa9GX6w
Liste et fonction contro é-bike :
https://www.youtube.com/watch?v=G9HB8_MGR24
Solex électrique fait maison ""teste sur route :
https://www.youtube.com/watch?v=kNlLPTMohtI
Texte: