Différences entre versions de « Projets:Finger Starter »
De wikilab
| (14 versions intermédiaires par 2 utilisateurs non affichées) | |||
| Ligne 1 : | Ligne 1 : | ||
| + | {{Infobox projet | ||
| + | |Image principale=Finger starter IMG 5739.JPG | ||
| + | |Description=Réaliser un finger starter proposé par Inmoov : [http://inmoov.fr/finger-starter/ finger starter] | ||
| + | |Porteur de projet=Alix | ||
| + | |Contributeurs=Alix | ||
| + | |Fabmanager=Yo | ||
| + | |Référent documentation=Yo | ||
| + | |Catégorie de handicap=Membre supérieur | ||
| + | |Etat d'avancement=Réalisés | ||
| + | |Statut de la documentation=Partielle | ||
| + | |Relecture de la documentation=Non vérifiée | ||
| + | |Licence=by-sa | ||
| + | |Projet date=2021-03-24 | ||
| + | |Nom humanlab=Humanlab_MHK | ||
| + | }} | ||
| + | [[File:finger_starter_IMG_5739.JPG|400px|right]] | ||
| + | |||
== Description du projet == | == Description du projet == | ||
| Ligne 37 : | Ligne 54 : | ||
[http://inmoov.fr/finger-starter/ finger starter] | [http://inmoov.fr/finger-starter/ finger starter] | ||
| + | Détail des capteurs : [https://images-eu.ssl-images-amazon.com/images/I/C1lrpIfADaS.pdf Détail des capteurs] | ||
==Image des différentes versions réalisée avec le code correspondant== | ==Image des différentes versions réalisée avec le code correspondant== | ||
| − | * 1 - Joystick | + | * 1 - Bouton |
| + | |||
| + | [[File:image000004.jpg|400px]] | ||
| + | |||
| + | <pre> | ||
| + | #include <Servo.h> | ||
| + | |||
| + | Servo myservo; // create servo object to control a servo | ||
| + | |||
| + | const int servoPin = 9; // Digital PWM pin used to control the servo | ||
| + | const int buttonPin = 8; // Digital pin to attach the button | ||
| + | |||
| + | int val = 0; // variable to read the value from the button | ||
| + | |||
| + | void setup() { | ||
| + | myservo.attach(servoPin); // attaches the servo to "servoPin" | ||
| + | } | ||
| + | |||
| + | void loop() { | ||
| + | val = digitalRead(buttonPin); // gets button current state | ||
| + | if (val == 0) { // checks if the button is pressed | ||
| + | myservo.write(120); // lifts finger | ||
| + | } | ||
| + | else { | ||
| + | myservo.write(10); // lowers finger | ||
| + | } | ||
| + | delay(30); // waits for servo to get there | ||
| + | } | ||
| + | </pre> | ||
| + | |||
| + | [[File:image000005.jpg|400px]] | ||
| + | |||
| + | * 2 - Photo-interrupteur | ||
| + | |||
| + | [[File:image000000.jpg|400px]] | ||
| + | |||
| + | <pre> | ||
| + | #include <Servo.h> | ||
| + | |||
| + | Servo myservo; // create servo object to control a servo | ||
| + | |||
| + | const int servoPin = 9; // Digital PWM used to control the servo | ||
| + | const int photoPin = 8; // Digital pin used to control the photo interruptor | ||
| + | |||
| + | int val = 0; // variable to read the value from the photo interruptor | ||
| + | |||
| + | void setup() { | ||
| + | myservo.attach(servoPin); // attaches the servo to "servoPin" | ||
| + | } | ||
| + | |||
| + | void loop() { | ||
| + | val = digitalRead(photoPin); // reads value from photo interruptor | ||
| + | if (val == 1) { // check if the photo interruptor is blocked | ||
| + | myservo.write(120); // lifts finger | ||
| + | } | ||
| + | else { | ||
| + | myservo.write(10); // lowers finger | ||
| + | } | ||
| + | delay(30); // waits for servo to get there | ||
| + | } | ||
| + | </pre> | ||
| + | |||
| + | [[File:image000003.jpg|400px]] | ||
| + | |||
| + | * 3 - Photorésistance | ||
| + | |||
| + | [[File:image000002.jpg|400px]] | ||
| + | |||
| + | <pre> | ||
| + | #include <Servo.h> | ||
| + | |||
| + | Servo myservo; // create servo object to control a servo | ||
| + | |||
| + | const int photoResistPin = A0; // Analog pin used to connect the photo resistor | ||
| + | const int servoPin = 9; // Digital PWM used to control the servo | ||
| + | |||
| + | int light = 0; // variable to read the value from the photo resistor pin | ||
| + | |||
| + | void setup() { | ||
| + | myservo.attach(servoPin); // attaches the servo to "servoPin" | ||
| + | pinMode(photoResistPin, INPUT); // puts the photo-resistor pin in INPUT | ||
| + | } | ||
| + | |||
| + | void loop() { | ||
| + | light = analogRead(A0); // reads value from photo-resistor | ||
| + | light = map(light, 0, 1023, 180, 0); // scales it to be usable by the servo | ||
| + | myservo.write(light); // sets the servo position according to the value | ||
| + | delay(30); // waits for the servo to get there | ||
| + | } | ||
| + | </pre> | ||
| + | |||
| + | [[File:image000001.jpg|400px]] | ||
| + | |||
| + | * 4 - Joystick | ||
| + | |||
| + | [[File:image000006.jpg|400px]] | ||
| + | |||
| + | <pre> | ||
| + | #include <Servo.h> | ||
| + | |||
| + | Servo myservo; // create servo object to control a servo | ||
| + | |||
| + | const int joystickPin = A0; // Analog In pin used to connect the joystick | ||
| + | const int servoPin = 9; // Digital PWM used to control the servo | ||
| + | |||
| + | int rotation = 0; // variable to read the X or Y value from the joystick | ||
| + | |||
| + | |||
| + | void setup() { | ||
| + | myservo.attach(servoPin); // attaches the servo to "servoPin" | ||
| + | pinMode(joystickPin, INPUT); // puts the joystick pin in INPUT | ||
| + | } | ||
| − | + | void loop() { | |
| + | rotation = analogRead(A0); // reads value from joystick | ||
| + | rotation = map(rotation, 0, 1023, 180, 0); // scales it to be usable by the servo | ||
| + | myservo.write(rotation); // sets the servo position according to the value | ||
| + | delay(30); // waits for the servo to get there | ||
| + | } | ||
| + | [[File:image000007.jpg|400px]] | ||
[[Category:Projets]] | [[Category:Projets]] | ||
| − | [[Category: | + | [[Category:Réalisés]] |
Version actuelle datée du 13 juillet 2022 à 14:10
| Finger Starter
| |
|---|---|
| Informations | |
| Description | Réaliser un finger starter proposé par Inmoov : finger starter |
| Catégorie | Membre supérieur |
| Etat d'avancement | Réalisés |
| Techniques | |
| Durée de fabrication | |
| Coût matériel | |
| Niveau | |
| Licence | by-sa |
| Date de création | 2021-03-24 |
| Équipe | |
| Porteur de projet | Alix |
| Contributeurs | Alix |
| Fabmanager | Yo |
| Référent documentation | Yo |
| Nom humanlab | Humanlab_MHK |
| Documentation | |
| Statut de la documentation | Partielle |
| Relecture de la documentation | Non vérifiée |

Description du projet
Le projet est de réaliser un finger starter proposé par Inmoov : finger starter
Cahier des charges
Utiliser un kit de capteurs afin de contrôler le finger starter de manière originale.
Analyse de l'existant
http://inmoov.fr/finger-starter/
Equipe (Porteur de projet et contributeurs)
- Concepteurs/contributeurs : Alix
- Fabmanager référent : Yo
- Responsable de documentation : Yo
Matériel nécessaire
- 1 Finger Starter à imprimer en 3D : http://inmoov.fr/finger-starter/
- Des fils de prototypage
- Platine d'essai
- kit de capteurs : electronic component kits
Outils nécessaires
- Un ordinateur
Coût
- - de 50€
Fichiers source
Détail des capteurs : Détail des capteurs
Image des différentes versions réalisée avec le code correspondant
- 1 - Bouton

#include <Servo.h>
Servo myservo; // create servo object to control a servo
const int servoPin = 9; // Digital PWM pin used to control the servo
const int buttonPin = 8; // Digital pin to attach the button
int val = 0; // variable to read the value from the button
void setup() {
myservo.attach(servoPin); // attaches the servo to "servoPin"
}
void loop() {
val = digitalRead(buttonPin); // gets button current state
if (val == 0) { // checks if the button is pressed
myservo.write(120); // lifts finger
}
else {
myservo.write(10); // lowers finger
}
delay(30); // waits for servo to get there
}

- 2 - Photo-interrupteur

#include <Servo.h>
Servo myservo; // create servo object to control a servo
const int servoPin = 9; // Digital PWM used to control the servo
const int photoPin = 8; // Digital pin used to control the photo interruptor
int val = 0; // variable to read the value from the photo interruptor
void setup() {
myservo.attach(servoPin); // attaches the servo to "servoPin"
}
void loop() {
val = digitalRead(photoPin); // reads value from photo interruptor
if (val == 1) { // check if the photo interruptor is blocked
myservo.write(120); // lifts finger
}
else {
myservo.write(10); // lowers finger
}
delay(30); // waits for servo to get there
}

- 3 - Photorésistance

#include <Servo.h>
Servo myservo; // create servo object to control a servo
const int photoResistPin = A0; // Analog pin used to connect the photo resistor
const int servoPin = 9; // Digital PWM used to control the servo
int light = 0; // variable to read the value from the photo resistor pin
void setup() {
myservo.attach(servoPin); // attaches the servo to "servoPin"
pinMode(photoResistPin, INPUT); // puts the photo-resistor pin in INPUT
}
void loop() {
light = analogRead(A0); // reads value from photo-resistor
light = map(light, 0, 1023, 180, 0); // scales it to be usable by the servo
myservo.write(light); // sets the servo position according to the value
delay(30); // waits for the servo to get there
}

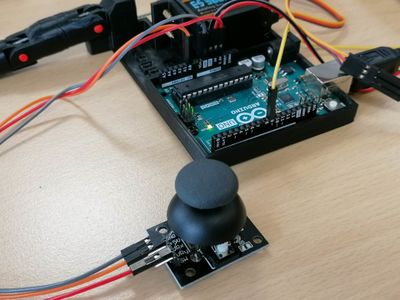
- 4 - Joystick

#include <Servo.h>
Servo myservo; // create servo object to control a servo
const int joystickPin = A0; // Analog In pin used to connect the joystick
const int servoPin = 9; // Digital PWM used to control the servo
int rotation = 0; // variable to read the X or Y value from the joystick
void setup() {
myservo.attach(servoPin); // attaches the servo to "servoPin"
pinMode(joystickPin, INPUT); // puts the joystick pin in INPUT
}
void loop() {
rotation = analogRead(A0); // reads value from joystick
rotation = map(rotation, 0, 1023, 180, 0); // scales it to be usable by the servo
myservo.write(rotation); // sets the servo position according to the value
delay(30); // waits for the servo to get there
}