Différences entre versions de « Projets:Roboto »
| (223 versions intermédiaires par 2 utilisateurs non affichées) | |||
| Ligne 1 : | Ligne 1 : | ||
| + | {{Infobox projet | ||
| + | |Image principale=Roboto final.jpg | ||
| + | |Description=Robot conteur sur roulettes télécommandé en bluetooth avec une manette Nunchuck pour les déplacements | ||
| + | |Porteur de projet=Sebprusa | ||
| + | |Contributeurs=Delphine, Sebprusa, Ylc | ||
| + | |Fabmanager=Delphine | ||
| + | |Référent documentation=Delphine | ||
| + | |Catégorie de handicap=Hors handicap | ||
| + | |Etat d'avancement=Réalisés | ||
| + | |Statut de la documentation=Complète | ||
| + | |Relecture de la documentation=Non vérifiée | ||
| + | |Techniques=arduino, moteur, bluetooth | ||
| + | |Durée de fabrication=de 16 à 32 h | ||
| + | |Coût matériel=Plus de 200 euros | ||
| + | |Niveau=Moyen | ||
| + | |Licence=by-sa | ||
| + | |Projet date=2019-06-27 | ||
| + | |Nom humanlab=Humanlab_MHK | ||
| + | }} | ||
== Description du projet == | == Description du projet == | ||
Projet de robot sur roulette télécommandé en bluetooth. | Projet de robot sur roulette télécommandé en bluetooth. | ||
| + | Ce prototype est un robot conteur sur roulettes télécommandé en bluetooth avec une manette nunchuck pour les déplacaments. Sur le chassis est fixé une tablette sur laquelle il y a des contes que l'on peut lire en manipulant la tablette. | ||
| + | Il a été réalisé en collaboration avec l' artiste Mari Gwalarm pour l'habillage du robot et a été réalisé de manière collaborative auprès d'un public diversifié de 6 à 99 ans avec le soutien de My Human Kit. | ||
| + | |||
| + | Ce prototype est un objet pédagogique avec la finalité de servir dans des médiathèques. | ||
| + | |||
| + | [[File:roboto_final.jpg|left|800px]] | ||
| + | |||
| + | <br clear=all> | ||
== Liens utiles == | == Liens utiles == | ||
| Ligne 8 : | Ligne 35 : | ||
* [https://github.com/myhumankit/roboto Dépôt GitHub du projet] | * [https://github.com/myhumankit/roboto Dépôt GitHub du projet] | ||
| − | == | + | == Fichiers sources == |
| + | [[File:Roboto_sketchs_maitre_esclave.zip|Télécharger les sketchs Arduino]] | ||
== Analyse de l'existant == | == Analyse de l'existant == | ||
== Equipe (Porteur de projet et contributeurs) == | == Equipe (Porteur de projet et contributeurs) == | ||
| − | * Porteur de projet | + | * Porteur de projet :Sébastien Lutz |
| − | * Contributeurs | + | * Contributeurs :Yves Le chevalier, Delphine Bézier |
| − | + | * Fabmanager référent : Delphine Bézier | |
| − | * Fabmanager référent | ||
| − | |||
| − | |||
== Matériel nécessaire == | == Matériel nécessaire == | ||
| − | ====== | + | * [[Media:robotmaurebzh2vers.jpg|Bois de palette de récupération]] |
| + | * [[Media:Cotes_plaque_moteur_roboto.jpg|Plaque aluminium support moteur]],[[Media:plan-plaque-robot_cotes.pdf|Lien vers le pdf]] | ||
| + | * [[Media:roue_robot.png|roues]], [https://www.leroymerlin.fr/v3/p/produits/roue-fixe-sur-axe-diam-175-mm-e21495 Lien vers le fournisseur] | ||
| + | * [https://www.leroymerlin.fr/v3/p/produits/roulette-pivotante-a-platine-diam-42-mm-e21445 2 roulettes] | ||
| + | * [[Media:entretoise_roues_robot.png|entretoises pour roues]], [https://www.amazon.fr/gp/product/B07D3H3YHK/ref=ppx_yo_dt_b_asin_title_o05_s00?ie=UTF8&psc=1 Lien vers le fournisseur] | ||
| + | * vis et boulons à ajuster selon épaisseur du bois | ||
| + | * [[Media:batterie_12v_12ah.jpg|batterie 12volt 12AH]] | ||
| + | * [[Media:batterie_12v_12ah.jpg|Chargeur de batterie 12V]] | ||
| + | * [https://www.gotronic.fr/art-anneau-neopixel-12-leds-rgb-ada1643-22875.htm 2 anneaux de 12 leds RGB]. Un support pour les anneaux a été modélisé en 3D, à retrouver dans les fichiers sources. Les anneaux de LED étaient prévus initialement pour faire des yeux multicolores mais n'ont finalement pas été implanté. | ||
| + | * [https://www.banggood.com/fr/10pcs-Rocker-Switchs-Copper-Boat-Rocker-Switch-2-Pin-Plastic-Button-ONOff-SPST-p-1276758.html?rmmds=search&ur_warehouse=CN Interrupteur pour le boitier 3d] | ||
| + | * [https://www.banggood.com/fr/5Pcs-Mini-Round-Black-2-Pin-SPST-ON-OFF-Rocker-Switch-Button-p-946012.html?rmmds=search&cur_warehouse=CN Interrupteur pour le boitier électrique pour éviter une consommation de courant inutile] | ||
| + | * [https://www.banggood.com/fr/TAKANAWA-555-Metal-Gear-Motor-12V-24V-DC-Gear-Motor-p-995307.html?rmmds=myorder&cur_warehouse=CN moteur à démultiplication Takanawa motoréducteur 555 métallique 12v - 24v motoréducteur à courant continu] | ||
| + | *[[Media:Arduino uno.jpg|carte arduino uno]] | ||
| + | *[[Media:Arduino-nano-microprocessor.jpg|carte arduino nano]] | ||
| + | *[https://www.robotshop.com/eu/fr/controleur-moteur-dc-2x15a.html Contrôleur de Moteur DC 2x15A, 4.8-35V] | ||
| + | *[[Media:Nunchuck2.jpg|manette de wii filaire]] | ||
| + | *[NunChucky Wii Nunchuck I2C Breakout Adapter Adaptateur nunchuck] | ||
| + | *[[Media:Hc05-1.jpg|hc05 x 2 : 2 modules bluethooth à configurer en maître et esclave | ||
| + | *pile 9 volts x 1]] | ||
| + | *[[Media:Boitier-commande.png|boîtier commande avec LED à imprimer en 3D]], [[Media:Boitier-commande.png|Lien vers le fichier source]]. Le boitier est conçu pour ne pas arracher le fil de la nunchuk | ||
| + | *[[media:coffret_electrique.png|coffret électrique]] | ||
| + | |||
| + | <gallery mode="slideshow"> | ||
| + | File:robotmaurebzh2vers.jpg|Bois de palette | ||
| + | File:Cotes_plaque_moteur_roboto.jpg| Plaque aluminium support moteur. Fichier source [[Media:plaque-robot.zip|SVG à télécharger]] | ||
| + | File:roue_robot.png|Roues robot, [https://www.leroymerlin.fr/v3/p/produits/roue-fixe-sur-axe-diam-175-mm-e21495 Lien vers le fournisseur] | ||
| + | File:entretoise_roues_robot.png|Entretoise roues robot, [https://www.amazon.fr/gp/product/B07D3H3YHK/ref=ppx_yo_dt_b_asin_title_o05_s00?ie=UTF8&psc=1 Lien vers le fournisseur] | ||
| + | File:batterie_12v_12ah.jpg|Batterie 12V_12Ah | ||
| + | File:Neopixel rond.jpg|Anneau de leds neopixels, [https://www.gotronic.fr/art-anneau-neopixel-12-leds-rgb-ada1643-22875.htm Lien vers le fournisseur] | ||
| + | File:Interupteur_robot_boitier.jpg, [https://www.banggood.com/fr/10pcs-Rocker-Switchs-Copper-Boat-Rocker-Switch-2-Pin-Plastic-Button-ONOff-SPST-p-1276758.html?rmmds=search&cur_warehouse=CN Lien vers le fournisseur] | ||
| + | File:none.jpg, [https://www.banggood.com/fr/5Pcs-Mini-Round-Black-2-Pin-SPST-ON-OFF-Rocker-Switch-Button-p-946012.html?rmmds=search&cur_warehouse=CN Lien vers le fournisseur] | ||
| + | File:moteur-takanawa2.jpg|moteur à démultiplication Takanawa motoréducteur 555 métallique 12v - 24v motoréducteur à courant continu, [https://www.banggood.com/fr/TAKANAWA-555-Metal-Gear-Motor-12V-24V-DC-Gear-Motor-p-995307.html?rmmds=myorder&cur_warehouse=CN Lien vers le fournisseur] | ||
| + | File:Controleur moteur robot.png|Contrôleur moteur, [https://www.robotshop.com/eu/fr/controleur-moteur-dc-2x15a.html Lien vers fournisseur] | ||
| + | File:Arduino uno.jpg|Carte Arduino Uno | ||
| + | File:Arduino-nano-microprocessor.jpg|Carte Arduino Nano | ||
| + | File:Nunchuck2.jpg|Manette de wii filaire | ||
| + | File:adaptateur_wii.png|Adaptateur Nunchuck, [https://www.robotshop.com/eu/fr/platine-deploiement-i2c-wii-nunchuck-solarbotics.html Lien vers fournisseur], [[File:nunchuck_adapter.pdf|lien vers datasheet]] | ||
| + | File:Hc05-1.jpg|module bluetooth HC-O5 | ||
| + | File:Pile_9v.jpg|Pile 9V | ||
| + | File:Boitier-commande.png|Boitier de commande imprimé en 3D, [[Media:Boitier-commande.png|Lien vers le fichier source]] | ||
| + | File:coffret_electrique.png|Coffret électrique. Bien vérifier les dimensions pour la batterie suivant l'emplacement. Découpe à l'intérieur pour faire de la place mais attention si vous voulez garder l’étanchéité, acheter un coffret électrique | ||
| + | |||
| + | </gallery> | ||
| + | |||
| + | ===== Informations sur le moteur à démultiplication ===== | ||
| + | ======Description====== | ||
| + | Takanawa motoréducteur 555 métallique 12v - 24v motoréducteur à courant continu | ||
| − | + | [https://www.banggood.com/fr/TAKANAWA-555-Metal-Gear-Motor-12V-24V-DC-Gear-Motor-p-995307.html?rmmds=myorder&cur_warehouse=CN Lien vers le fournisseur] | |
| − | ===== | + | ======spécification====== |
| − | + | * modèle dcmotor RS- 555 | |
| + | * tension appropriée 12v-24v | ||
| + | * vitesse 10-20-40-80 tr / min | ||
| + | * courant de charge 2.5a | ||
| + | * Vitesse à vide DC12V 3000-3500r / min | ||
| + | * dc la 7000-8000r / min | ||
| + | * grandeur diamètre : 37 mm | ||
| + | * longueur: 65 mm | ||
| + | * poids 502g | ||
| + | * longueur de l'arbre 16mm | ||
| − | + | [[File:dimension_moteur.png|200px]] | |
| − | + | [[File: moteur-takanawa2.jpg|400 px]] | |
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | == | + | ==Préparation du châssis== |
| − | + | Se référer au schéma ci-dessous pour réaliser le chassis. | |
| − | + | [[File:robot plan de réalisation.pdf|left|900px]] | |
| + | <br clear=all> | ||
| − | + | Votre chassis devrait ressembler à cette image :) | |
| − | |||
| − | |||
| − | = | + | [[File:Capture robot.PNG|600px]] |
| − | + | <br clear=all> | |
| − | + | ==Les étapes pas à pas pour la partie électronique == | |
| − | ===== | + | Dans les étapes suivantes nous allons valider le fonctionnement de chaque brique utilisée pour ce projet étape par étape : |
| − | + | # paramétrage des modules HC-05 pour en configurer un entant que maitre et l'autre en tant qu'esclave | |
| − | < | + | # implémentation de la manette Nunchuck dans le sketch maître pour lire les données envoyées en bluetooth dans le sketch esclave |
| + | # implémentation du contrôle des moteurs par la Nunchuck dans le sketch esclave | ||
| + | # montage final du prototype et téléversement du code final | ||
| + | |||
| + | === 1 : Configuration des modules HC 05 : maître et esclave=== | ||
| + | [http://wikilab.myhumankit.org/index.php?title=Projets:Communication_Bluetooth_HC_05 Suivre ce tutoriel] | ||
| + | |||
| + | === 2 : Implémentation de la manette Nunchuck dans le sketch maître=== | ||
| + | ====Schema du montage maître==== | ||
| + | Circuit maitre : Arduino Nano+ Bluetooth HC 05 + Nunchuck +adaptateur Nunchuck | ||
| + | |||
| + | ====Code arduino==== | ||
| + | # Installer la librairie wiichuck directement depuis l'IDE Arduino ou [https://www.arduinolibraries.info/libraries/wii-chuck la télécharger ici] | ||
| + | # Téléverser le sketch Roboto maître sur la carte arduino nano sur laquelle votre HC 05 a été configuré en maître | ||
| + | # Connecter ensuite la carte Arduino Uno avec le module esclave et vérifier dans le port série qu'il reçoit bien les données | ||
| + | |||
| + | <pre> | ||
| + | //Roboto | ||
| + | //Sketch maître : test de la Nunchuck avec envoie des données en bluetooth avec HC 05 sur le sketch esclave | ||
| + | //My Human Kit | ||
| + | |||
| + | //Télécharger la librarie wiichuck:https://www.arduinolibraries.info/libraries/wii-chuck | ||
| + | |||
| + | //Sketch maitre à utiliser avec le sketch esclave | ||
| + | |||
| + | #include <WiiChuck.h> | ||
| + | #include <Wire.h> | ||
| + | #include <SoftwareSerial.h> | ||
| + | |||
| + | SoftwareSerial ArduinoSlave(10, 11); // RX | TX //hc 05 | ||
| + | |||
| + | #define BROCHE_SCL A4 //DATA //nunchuck | ||
| + | #define BROCHE_SDA A5 //CLOCK //nunchuck | ||
| + | |||
| + | int joyX; | ||
| + | int joyY; | ||
| + | boolean boutonC; | ||
| + | boolean boutonZ; | ||
| + | |||
| + | |||
| + | |||
| + | Nunchuck nunchuck(BROCHE_SDA, BROCHE_SCL); | ||
| + | |||
| + | //String answer; | ||
| + | String msg; | ||
| + | |||
| + | |||
| + | |||
| + | void setup(void) | ||
| + | { | ||
| + | |||
| + | |||
| + | Serial.begin(38400); | ||
| + | Serial.println("Enter AT commands:"); | ||
| + | ArduinoSlave.begin(38400); // HC-05 default speed in AT command more | ||
| + | |||
| + | Serial.println("Starting Wiichuck Generic Controller Demo"); | ||
| + | nunchuck.begin(); | ||
| + | int i; | ||
| + | |||
| + | } | ||
| + | |||
| + | void readSerialPort() { | ||
| + | while (Serial.available()) { | ||
| + | delay(100); | ||
| + | if (Serial.available() > 0) { | ||
| + | char c = Serial.read(); //gets one byte from serial buffer | ||
| + | msg += c; //makes the string readString //recoit les datas du nunchuck | ||
| + | } | ||
| + | } | ||
| + | Serial.flush(); | ||
| + | } | ||
| + | |||
| + | |||
| + | void loop() | ||
| + | { | ||
| + | //Lire les données reçues de la manette Nunchuck | ||
| + | nunchuck.readData(); | ||
| + | |||
| + | joyX = nunchuck.getJoyX(); | ||
| + | Serial.print("JoyX :"); | ||
| + | Serial.println(joyX); | ||
| + | |||
| + | joyY = nunchuck.getJoyY(); | ||
| + | Serial.print("JoyY :"); | ||
| + | Serial.println(joyY); | ||
| + | |||
| + | boutonC = nunchuck.checkButtonC(); | ||
| + | Serial.print("boutonC :"); | ||
| + | Serial.println(boutonC); | ||
| + | |||
| + | boutonZ = nunchuck.checkButtonZ(); | ||
| + | Serial.print("boutonZ :"); | ||
| + | Serial.println(boutonZ); | ||
| + | |||
| + | //Envoi des données de la Nunchuck au module esclave | ||
| + | ArduinoSlave.print(joyX); | ||
| + | ArduinoSlave.print(";"); | ||
| + | ArduinoSlave.print(joyY); | ||
| + | ArduinoSlave.print(";"); | ||
| + | ArduinoSlave.print(boutonC); | ||
| + | ArduinoSlave.print(";"); | ||
| + | ArduinoSlave.print(boutonZ); | ||
| + | ArduinoSlave.println(";"); | ||
| − | + | ||
| − | + | delay(200); | |
| + | } | ||
| − | + | </pre> | |
| − | + | ===3 : implémentation du contrôle des moteurs par la Nunchuck dans le sketch esclave=== | |
| − | + | ====Schema du montage==== | |
| − | + | Circuit esclave : Arduino Uno + Carte contrôleur moteurs + Moteurs + Bluetooth HC 05 | |
| − | |||
| − | |||
| + | [[File:Shema robot batterieetc .pdf |900px]] | ||
| − | ==== | + | ====Explications des commandes de moteur pour les roues du robot==== |
| − | + | [[File:cmd_moteurs_robot_roues_V2_1.pdf|700px]] | |
| − | [[ | ||
| − | |||
| + | ====Code pour Arduino Uno dont le HC-05 est configuré en esclave==== | ||
| + | Téléverser le sketch Roboto esclave sur la carte Arduino Uno. | ||
| − | + | <pre> | |
| − | + | /* | |
| + | # Product: DC Motor Driver 2x15A_lite | ||
| + | # SKU : DRI0018 | ||
| + | # Description: | ||
| + | # Drive 2 motors with this DC Motor Driver module | ||
| + | # Hardwares: | ||
| + | 1. Arduino UNO | ||
| + | 2. DC Motor Driver 2x15A_lite | ||
| + | 3. DC motors x2 | ||
| + | #Steps: | ||
| + | 1.Connect the DMotD_PWM & DMotG_PWM to UNO digital 5 & 6 | ||
| + | 2.Connect the DMotD_EN & DMotG_EN to UNO digital 4 & 7 | ||
| + | 3.Connect +5V & GND to UNO 5V & GND | ||
| − | + | Code : Delphine Bézier et Yves Le chevalier | |
| − | + | */ | |
| + | //Bluetooth | ||
| + | #include <SoftwareSerial.h> | ||
| + | SoftwareSerial ArduinoMaster(10, 11); // RX | TX | ||
| − | + | //nunchuck | |
| + | int joyX; | ||
| + | int joyY; | ||
| + | int joyC; | ||
| + | int joyZ; | ||
| − | + | //DC Motor Driver pins | |
| + | int VMotD = 5; //VMotD Speed Control right motor | ||
| + | int VMotG = 6; //VMotG Speed Control left motor | ||
| + | int DMotG = 7; //DMotD Direction Control | ||
| + | int DMotD = 4; //DMotD Direction Control | ||
| − | + | //infos moteurs | |
| − | + | boolean p;//détection d'un pivotement | |
| − | + | int smg;//sens moteur gauche | |
| − | + | int smd;//sens moteur droite | |
| − | + | int vmg;//vitesse moteur gauche | |
| − | + | int vmd;//vitesse moteur droite | |
| − | + | float b;//valeur(amplitude) du braquage | |
| − | + | int v1;//valeur vitesse moteur 1 | |
| − | + | int v2;//valeur vitesse moteur 2 | |
| − | |||
| + | int var [4] = {0, 0, 0, 0}; | ||
| + | int k = 0; | ||
| − | + | void setup() { | |
| − | + | //motor driver | |
| − | + | int i; | |
| − | + | for (i = 4; i <= 7; i++) | |
| − | + | pinMode(i, OUTPUT); | |
| + | Serial.println("Run keyboard control"); | ||
| + | digitalWrite(VMotD, LOW); | ||
| + | digitalWrite(VMotG, LOW); | ||
| + | //bluetooth serial | ||
| + | Serial.begin(38400); | ||
| + | Serial.println("Bluetooth nunchuck esclave start"); | ||
| + | ArduinoMaster.begin(38400); | ||
| + | } | ||
| − | + | void loop() { | |
| − | { | ||
| − | |||
| − | === | + | while (ArduinoMaster.available() > 0 ) { |
| − | + | char car = ArduinoMaster.read(); | |
| + | // while (Serial.available() > 0 ) { | ||
| + | // char car = Serial.read(); | ||
| + | // Serial.print(car); | ||
| + | switch (car) { | ||
| + | case '\n': // fin de données | ||
| + | renvoi(); | ||
| + | execution(); | ||
| + | k = 0; | ||
| + | break; | ||
| + | case ';': // séparateur | ||
| + | k++; | ||
| + | break; | ||
| + | default: | ||
| + | var[k] = (var[k] * 10) + (car - 48); | ||
| + | break; | ||
| + | } | ||
| + | // delay(50); | ||
| + | } | ||
| + | delay(10); | ||
| + | } | ||
| − | + | void renvoi() { | |
| − | ==== | + | joyX = var[0]; |
| − | + | joyY = var[1]; | |
| + | joyC = var[2]; | ||
| + | joyZ = var[3]; | ||
| + | Serial.print("Brut "); | ||
| + | Serial.print("joyX :"); | ||
| + | Serial.print(joyX); | ||
| + | Serial.print(" joyY :"); | ||
| + | Serial.println(joyY); | ||
| + | Serial.print(" joyC :"); | ||
| + | Serial.print(joyC); | ||
| + | Serial.print(" joyZ :"); | ||
| + | Serial.println(joyZ); | ||
| + | for (k = 0; k < 4; k++) { | ||
| + | Serial.println(var[k]); // renvoi des valeurs reçues | ||
| + | var[k] = 0; | ||
| + | } | ||
| + | // delay(50); | ||
| + | } | ||
| + | void execution() { // execution ordre recu | ||
| + | // v1 = 0; | ||
| + | //v2 = 0; | ||
| + | int joyX1 = map(joyX, 26, 231, -255, +255); | ||
| + | int joyY1 = map(joyY, 35, 226, -255, +255); | ||
| + | joyX = constrain (joyX1, -255, +255); | ||
| + | joyY = constrain (joyY1, -255, +255); | ||
| + | Serial.print("Remappé "); | ||
| + | Serial.print(" joyX :"); | ||
| + | Serial.print(joyX); | ||
| + | Serial.print(" joyY :"); | ||
| + | Serial.println(joyY); | ||
| − | + | //Pour éviter de consommer du courant on attribue une plage neutre plus large que zéro | |
| − | + | if ((joyX < 32) && (joyX > -32)) { | |
| − | + | joyX = 0; | |
| + | Serial.print(" joyXX :"); | ||
| + | Serial.print(joyX); | ||
| + | } | ||
| + | if ((joyY < 25) && (joyY > -25)) { | ||
| + | joyY = 0; | ||
| + | Serial.print(" joyYY :"); | ||
| + | Serial.println(joyY); | ||
| + | } | ||
| + | //détection du pivotement x | ||
| + | if ((joyX != 0)&& (joyY == 0)) { | ||
| + | p = 1; | ||
| + | } else p = 0; | ||
| − | + | ||
| − | |||
| − | |||
| − | |||
| + | //calcul du sens de rotation des moteurs (attention les moteurs sont montés en miroir) | ||
| + | if (p == 1) { | ||
| + | if (joyX < 0) { //tourne à gauche | ||
| + | smg = 0; | ||
| + | smd = 0; | ||
| + | } else { //tourne à droite | ||
| + | smg = 1; | ||
| + | smd = 1; | ||
| + | } | ||
| + | } else if (joyY < 0) { //recule | ||
| + | smg = 0; | ||
| + | smd = 1; | ||
| + | } else { //avance | ||
| + | smg = 1; | ||
| + | smd = 0; | ||
| + | } | ||
| − | |||
| − | |||
| − | + | //calcul valeur du braquage (amplitude du braquage) | |
| + | if (joyX < 0) { | ||
| + | b = joyX * -1; | ||
| + | } else { | ||
| + | b = joyX; | ||
| + | } | ||
| − | ===== | + | //si pivotement (cad que le centre de rotation est entre les deux moteurs), les deux moteurs vont à la même vitesse |
| − | ( | + | if (p == 1) { |
| − | + | vmg = b; | |
| + | vmd = b; | ||
| + | } | ||
| + | else { | ||
| + | if (joyY < 0) { //calcul de 2 vitesses v1 et v2 qui seront affectées au moteur | ||
| + | |||
| + | v1 = joyY * -1; //on calcule la valeur absolue de la vitesse moteur 1 | ||
| + | } | ||
| + | else { v1 = joyY; } | ||
| + | Serial.print("v1 :"); | ||
| + | Serial.println(v1); | ||
| + | Serial.print("v2 :"); | ||
| + | Serial.println(v2); | ||
| + | v2 = v1 - (v1 * (b / 255)); | ||
| + | Serial.print("v1 :"); | ||
| + | Serial.println(v1); | ||
| + | Serial.print("v2 :"); | ||
| + | Serial.println(v2); | ||
| − | ===== | + | // ajout ylc du 30/03/19 |
| − | { | + | /* compte tenu des moteurs (24v utilisés en 12v) il est nécéssaire de "doper" les vitesses qui leurs sont affectées |
| + | lors des virages en affectant à la roue la plus rapide la vitesse maximale et en augmentant la vitesse de la roue | ||
| + | la moins rapide dans la même proportion. */ | ||
| + | float c = 255 / v1; | ||
| + | v1 = 255; | ||
| + | v2 = v2 * c; | ||
| + | // fin ajout ylc du 30/03/19 | ||
| + | |||
| + | // Affectation des vitesses de rotation des moteurs des moteurs selon la direction où aller (droite ou gauche) | ||
| + | if ((joyX == 0) && (joyY == 0)) { | ||
| + | v1 = 0; | ||
| + | v2 = 0; | ||
| + | } | ||
| + | if (joyX < 0) { | ||
| + | vmg = v2; | ||
| + | vmd = v1; | ||
| + | } | ||
| + | else { | ||
| + | vmg = v1; | ||
| + | vmd = v2; | ||
| + | } | ||
| + | |||
| + | } | ||
| − | + | Serial.print("vmg :"); | |
| − | + | Serial.println(vmg); | |
| + | Serial.print("vmd :"); | ||
| + | Serial.println(vmd); | ||
| + | Serial.print("p :"); | ||
| + | Serial.println(p); | ||
| + | Serial.print("smg :"); | ||
| + | Serial.println(smg); | ||
| + | Serial.print("smd :"); | ||
| + | Serial.println(smd); | ||
| + | control_moteur(); | ||
| + | } | ||
| − | |||
| − | |||
| − | |||
| + | ////motor driver | ||
| + | void control_moteur() { //Move forward | ||
| + | analogWrite (VMotG, vmg); //PWM Speed Control | ||
| + | digitalWrite(DMotG, smg); //DMotD, direction control=p | ||
| + | analogWrite (VMotD, vmd); | ||
| + | digitalWrite(DMotD, smd); | ||
| + | } | ||
| − | |||
| − | |||
| − | |||
| − | + | </pre> | |
| − | |||
| − | |||
| − | + | ==Démonstration du prototype en action== | |
| − | + | Vidéo du chassis: | |
| − | + | {{#ev:youtube|https://youtu.be/QYqTCIU2rLE}} | |
| − | |||
| − | + | Vidéo du projet final: | |
| − | |||
| − | + | {{#ev:youtube|https://youtu.be/sAMOijOugbY}} | |
| − | |||
| − | |||
[[Category:Projets]] | [[Category:Projets]] | ||
| + | [[Category:Réalisés]] | ||
| + | [[Category:Mobilité]] | ||
Version actuelle datée du 7 avril 2023 à 15:52
| Roboto
| |
|---|---|
| Informations | |
| Description | Robot conteur sur roulettes télécommandé en bluetooth avec une manette Nunchuck pour les déplacements |
| Catégorie | Hors handicap |
| Etat d'avancement | Réalisés |
| Techniques | arduino, moteur, bluetooth |
| Durée de fabrication | de 16 à 32 h |
| Coût matériel | Plus de 200 euros |
| Niveau | Moyen |
| Licence | by-sa |
| Date de création | 2019-06-27 |
| Équipe | |
| Porteur de projet | Sebprusa |
| Contributeurs | Delphine, Sebprusa, Ylc |
| Fabmanager | Delphine |
| Référent documentation | Delphine |
| Nom humanlab | Humanlab_MHK |
| Documentation | |
| Statut de la documentation | Complète |
| Relecture de la documentation | Non vérifiée |
Description du projet
Projet de robot sur roulette télécommandé en bluetooth. Ce prototype est un robot conteur sur roulettes télécommandé en bluetooth avec une manette nunchuck pour les déplacaments. Sur le chassis est fixé une tablette sur laquelle il y a des contes que l'on peut lire en manipulant la tablette. Il a été réalisé en collaboration avec l' artiste Mari Gwalarm pour l'habillage du robot et a été réalisé de manière collaborative auprès d'un public diversifié de 6 à 99 ans avec le soutien de My Human Kit.
Ce prototype est un objet pédagogique avec la finalité de servir dans des médiathèques.

Liens utiles
- Page du projet sur le GesLab
- Canal de discussion du projet sur Framateam
- Documentation finale du projet
- Dépôt GitHub du projet
Fichiers sources
Fichier:Roboto sketchs maitre esclave.zip
Analyse de l'existant
Equipe (Porteur de projet et contributeurs)
- Porteur de projet :Sébastien Lutz
- Contributeurs :Yves Le chevalier, Delphine Bézier
- Fabmanager référent : Delphine Bézier
Matériel nécessaire
- Bois de palette de récupération
- Plaque aluminium support moteur,Lien vers le pdf
- roues, Lien vers le fournisseur
- 2 roulettes
- entretoises pour roues, Lien vers le fournisseur
- vis et boulons à ajuster selon épaisseur du bois
- batterie 12volt 12AH
- Chargeur de batterie 12V
- 2 anneaux de 12 leds RGB. Un support pour les anneaux a été modélisé en 3D, à retrouver dans les fichiers sources. Les anneaux de LED étaient prévus initialement pour faire des yeux multicolores mais n'ont finalement pas été implanté.
- Interrupteur pour le boitier 3d
- Interrupteur pour le boitier électrique pour éviter une consommation de courant inutile
- moteur à démultiplication Takanawa motoréducteur 555 métallique 12v - 24v motoréducteur à courant continu
- carte arduino uno
- carte arduino nano
- Contrôleur de Moteur DC 2x15A, 4.8-35V
- manette de wii filaire
- [NunChucky Wii Nunchuck I2C Breakout Adapter Adaptateur nunchuck]
- hc05 x 2 : 2 modules bluethooth à configurer en maître et esclave
- pile 9 volts x 1
- boîtier commande avec LED à imprimer en 3D, Lien vers le fichier source. Le boitier est conçu pour ne pas arracher le fil de la nunchuk
- coffret électrique

Bois de palette

Plaque aluminium support moteur. Fichier source SVG à télécharger

Roues robot, Lien vers le fournisseur

Entretoise roues robot, Lien vers le fournisseur

Batterie 12V_12Ah

Anneau de leds neopixels, Lien vers le fournisseur

moteur à démultiplication Takanawa motoréducteur 555 métallique 12v - 24v motoréducteur à courant continu, Lien vers le fournisseur

Contrôleur moteur, Lien vers fournisseur

Carte Arduino Uno

Carte Arduino Nano

Manette de wii filaire

Adaptateur Nunchuck, Lien vers fournisseur, Fichier:Nunchuck adapter.pdf

module bluetooth HC-O5

Pile 9V

Boitier de commande imprimé en 3D, Lien vers le fichier source

Coffret électrique. Bien vérifier les dimensions pour la batterie suivant l'emplacement. Découpe à l'intérieur pour faire de la place mais attention si vous voulez garder l’étanchéité, acheter un coffret électrique















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Informations sur le moteur à démultiplication
Description
Takanawa motoréducteur 555 métallique 12v - 24v motoréducteur à courant continu
spécification
- modèle dcmotor RS- 555
- tension appropriée 12v-24v
- vitesse 10-20-40-80 tr / min
- courant de charge 2.5a
- Vitesse à vide DC12V 3000-3500r / min
- dc la 7000-8000r / min
- grandeur diamètre : 37 mm
- longueur: 65 mm
- poids 502g
- longueur de l'arbre 16mm


Préparation du châssis
Se référer au schéma ci-dessous pour réaliser le chassis.
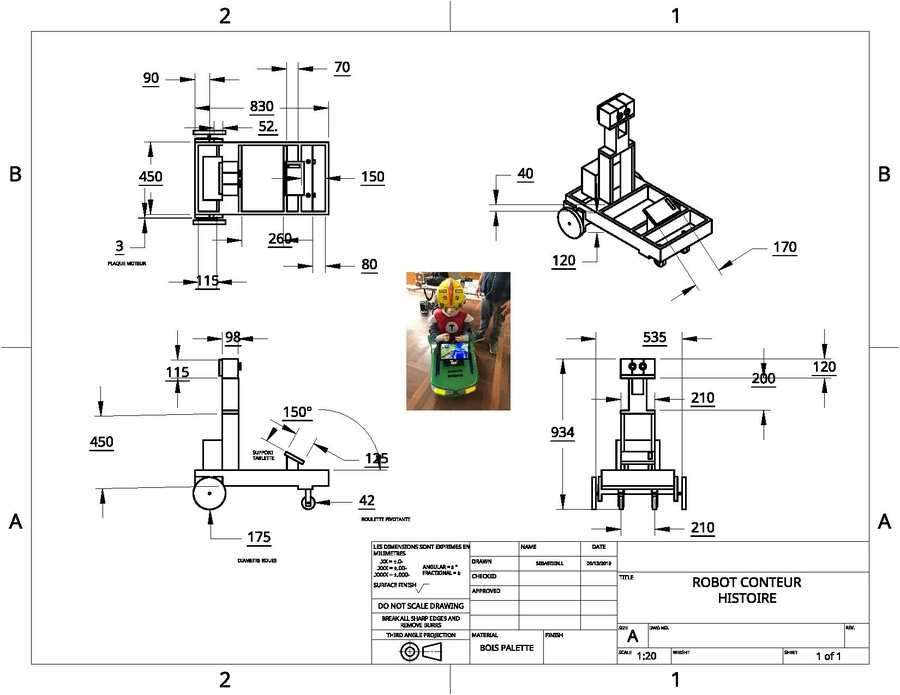
Votre chassis devrait ressembler à cette image :)

Les étapes pas à pas pour la partie électronique
Dans les étapes suivantes nous allons valider le fonctionnement de chaque brique utilisée pour ce projet étape par étape :
- paramétrage des modules HC-05 pour en configurer un entant que maitre et l'autre en tant qu'esclave
- implémentation de la manette Nunchuck dans le sketch maître pour lire les données envoyées en bluetooth dans le sketch esclave
- implémentation du contrôle des moteurs par la Nunchuck dans le sketch esclave
- montage final du prototype et téléversement du code final
1 : Configuration des modules HC 05 : maître et esclave
2 : Implémentation de la manette Nunchuck dans le sketch maître
Schema du montage maître
Circuit maitre : Arduino Nano+ Bluetooth HC 05 + Nunchuck +adaptateur Nunchuck
Code arduino
- Installer la librairie wiichuck directement depuis l'IDE Arduino ou la télécharger ici
- Téléverser le sketch Roboto maître sur la carte arduino nano sur laquelle votre HC 05 a été configuré en maître
- Connecter ensuite la carte Arduino Uno avec le module esclave et vérifier dans le port série qu'il reçoit bien les données
//Roboto
//Sketch maître : test de la Nunchuck avec envoie des données en bluetooth avec HC 05 sur le sketch esclave
//My Human Kit
//Télécharger la librarie wiichuck:https://www.arduinolibraries.info/libraries/wii-chuck
//Sketch maitre à utiliser avec le sketch esclave
#include <WiiChuck.h>
#include <Wire.h>
#include <SoftwareSerial.h>
SoftwareSerial ArduinoSlave(10, 11); // RX | TX //hc 05
#define BROCHE_SCL A4 //DATA //nunchuck
#define BROCHE_SDA A5 //CLOCK //nunchuck
int joyX;
int joyY;
boolean boutonC;
boolean boutonZ;
Nunchuck nunchuck(BROCHE_SDA, BROCHE_SCL);
//String answer;
String msg;
void setup(void)
{
Serial.begin(38400);
Serial.println("Enter AT commands:");
ArduinoSlave.begin(38400); // HC-05 default speed in AT command more
Serial.println("Starting Wiichuck Generic Controller Demo");
nunchuck.begin();
int i;
}
void readSerialPort() {
while (Serial.available()) {
delay(100);
if (Serial.available() > 0) {
char c = Serial.read(); //gets one byte from serial buffer
msg += c; //makes the string readString //recoit les datas du nunchuck
}
}
Serial.flush();
}
void loop()
{
//Lire les données reçues de la manette Nunchuck
nunchuck.readData();
joyX = nunchuck.getJoyX();
Serial.print("JoyX :");
Serial.println(joyX);
joyY = nunchuck.getJoyY();
Serial.print("JoyY :");
Serial.println(joyY);
boutonC = nunchuck.checkButtonC();
Serial.print("boutonC :");
Serial.println(boutonC);
boutonZ = nunchuck.checkButtonZ();
Serial.print("boutonZ :");
Serial.println(boutonZ);
//Envoi des données de la Nunchuck au module esclave
ArduinoSlave.print(joyX);
ArduinoSlave.print(";");
ArduinoSlave.print(joyY);
ArduinoSlave.print(";");
ArduinoSlave.print(boutonC);
ArduinoSlave.print(";");
ArduinoSlave.print(boutonZ);
ArduinoSlave.println(";");
delay(200);
}
3 : implémentation du contrôle des moteurs par la Nunchuck dans le sketch esclave
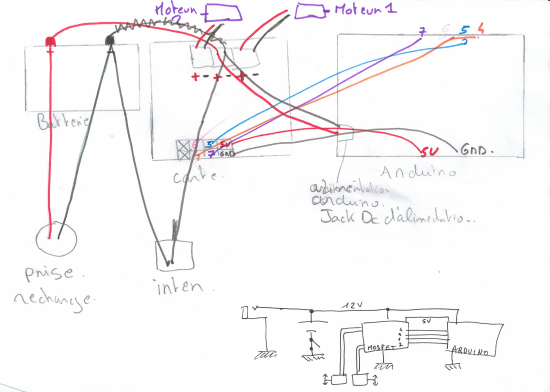
Schema du montage
Circuit esclave : Arduino Uno + Carte contrôleur moteurs + Moteurs + Bluetooth HC 05
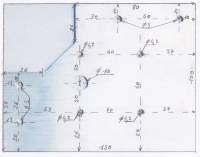
Explications des commandes de moteur pour les roues du robot
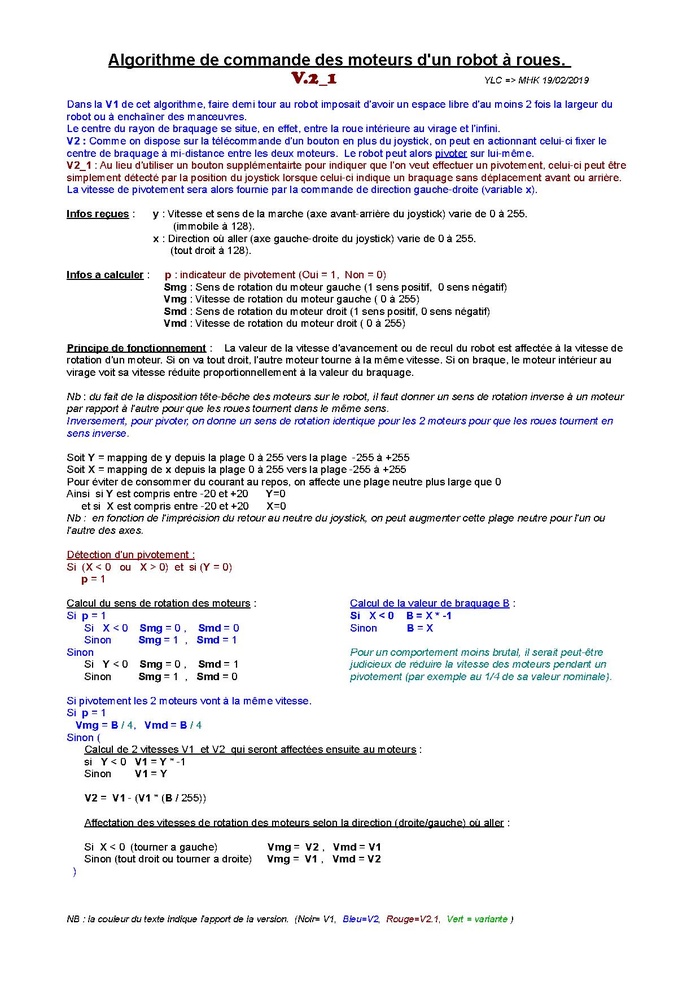
Code pour Arduino Uno dont le HC-05 est configuré en esclave
Téléverser le sketch Roboto esclave sur la carte Arduino Uno.
/*
# Product: DC Motor Driver 2x15A_lite
# SKU : DRI0018
# Description:
# Drive 2 motors with this DC Motor Driver module
# Hardwares:
1. Arduino UNO
2. DC Motor Driver 2x15A_lite
3. DC motors x2
#Steps:
1.Connect the DMotD_PWM & DMotG_PWM to UNO digital 5 & 6
2.Connect the DMotD_EN & DMotG_EN to UNO digital 4 & 7
3.Connect +5V & GND to UNO 5V & GND
Code : Delphine Bézier et Yves Le chevalier
*/
//Bluetooth
#include <SoftwareSerial.h>
SoftwareSerial ArduinoMaster(10, 11); // RX | TX
//nunchuck
int joyX;
int joyY;
int joyC;
int joyZ;
//DC Motor Driver pins
int VMotD = 5; //VMotD Speed Control right motor
int VMotG = 6; //VMotG Speed Control left motor
int DMotG = 7; //DMotD Direction Control
int DMotD = 4; //DMotD Direction Control
//infos moteurs
boolean p;//détection d'un pivotement
int smg;//sens moteur gauche
int smd;//sens moteur droite
int vmg;//vitesse moteur gauche
int vmd;//vitesse moteur droite
float b;//valeur(amplitude) du braquage
int v1;//valeur vitesse moteur 1
int v2;//valeur vitesse moteur 2
int var [4] = {0, 0, 0, 0};
int k = 0;
void setup() {
//motor driver
int i;
for (i = 4; i <= 7; i++)
pinMode(i, OUTPUT);
Serial.println("Run keyboard control");
digitalWrite(VMotD, LOW);
digitalWrite(VMotG, LOW);
//bluetooth serial
Serial.begin(38400);
Serial.println("Bluetooth nunchuck esclave start");
ArduinoMaster.begin(38400);
}
void loop() {
while (ArduinoMaster.available() > 0 ) {
char car = ArduinoMaster.read();
// while (Serial.available() > 0 ) {
// char car = Serial.read();
// Serial.print(car);
switch (car) {
case '\n': // fin de données
renvoi();
execution();
k = 0;
break;
case ';': // séparateur
k++;
break;
default:
var[k] = (var[k] * 10) + (car - 48);
break;
}
// delay(50);
}
delay(10);
}
void renvoi() {
joyX = var[0];
joyY = var[1];
joyC = var[2];
joyZ = var[3];
Serial.print("Brut ");
Serial.print("joyX :");
Serial.print(joyX);
Serial.print(" joyY :");
Serial.println(joyY);
Serial.print(" joyC :");
Serial.print(joyC);
Serial.print(" joyZ :");
Serial.println(joyZ);
for (k = 0; k < 4; k++) {
Serial.println(var[k]); // renvoi des valeurs reçues
var[k] = 0;
}
// delay(50);
}
void execution() { // execution ordre recu
// v1 = 0;
//v2 = 0;
int joyX1 = map(joyX, 26, 231, -255, +255);
int joyY1 = map(joyY, 35, 226, -255, +255);
joyX = constrain (joyX1, -255, +255);
joyY = constrain (joyY1, -255, +255);
Serial.print("Remappé ");
Serial.print(" joyX :");
Serial.print(joyX);
Serial.print(" joyY :");
Serial.println(joyY);
//Pour éviter de consommer du courant on attribue une plage neutre plus large que zéro
if ((joyX < 32) && (joyX > -32)) {
joyX = 0;
Serial.print(" joyXX :");
Serial.print(joyX);
}
if ((joyY < 25) && (joyY > -25)) {
joyY = 0;
Serial.print(" joyYY :");
Serial.println(joyY);
}
//détection du pivotement x
if ((joyX != 0)&& (joyY == 0)) {
p = 1;
} else p = 0;
//calcul du sens de rotation des moteurs (attention les moteurs sont montés en miroir)
if (p == 1) {
if (joyX < 0) { //tourne à gauche
smg = 0;
smd = 0;
} else { //tourne à droite
smg = 1;
smd = 1;
}
} else if (joyY < 0) { //recule
smg = 0;
smd = 1;
} else { //avance
smg = 1;
smd = 0;
}
//calcul valeur du braquage (amplitude du braquage)
if (joyX < 0) {
b = joyX * -1;
} else {
b = joyX;
}
//si pivotement (cad que le centre de rotation est entre les deux moteurs), les deux moteurs vont à la même vitesse
if (p == 1) {
vmg = b;
vmd = b;
}
else {
if (joyY < 0) { //calcul de 2 vitesses v1 et v2 qui seront affectées au moteur
v1 = joyY * -1; //on calcule la valeur absolue de la vitesse moteur 1
}
else { v1 = joyY; }
Serial.print("v1 :");
Serial.println(v1);
Serial.print("v2 :");
Serial.println(v2);
v2 = v1 - (v1 * (b / 255));
Serial.print("v1 :");
Serial.println(v1);
Serial.print("v2 :");
Serial.println(v2);
// ajout ylc du 30/03/19
/* compte tenu des moteurs (24v utilisés en 12v) il est nécéssaire de "doper" les vitesses qui leurs sont affectées
lors des virages en affectant à la roue la plus rapide la vitesse maximale et en augmentant la vitesse de la roue
la moins rapide dans la même proportion. */
float c = 255 / v1;
v1 = 255;
v2 = v2 * c;
// fin ajout ylc du 30/03/19
// Affectation des vitesses de rotation des moteurs des moteurs selon la direction où aller (droite ou gauche)
if ((joyX == 0) && (joyY == 0)) {
v1 = 0;
v2 = 0;
}
if (joyX < 0) {
vmg = v2;
vmd = v1;
}
else {
vmg = v1;
vmd = v2;
}
}
Serial.print("vmg :");
Serial.println(vmg);
Serial.print("vmd :");
Serial.println(vmd);
Serial.print("p :");
Serial.println(p);
Serial.print("smg :");
Serial.println(smg);
Serial.print("smd :");
Serial.println(smd);
control_moteur();
}
////motor driver
void control_moteur() { //Move forward
analogWrite (VMotG, vmg); //PWM Speed Control
digitalWrite(DMotG, smg); //DMotD, direction control=p
analogWrite (VMotD, vmd);
digitalWrite(DMotD, smd);
}
Démonstration du prototype en action
Vidéo du chassis:
Vidéo du projet final: