Différences entre versions de « Projets:Céci'ble »
| (53 versions intermédiaires par 4 utilisateurs non affichées) | |||
| Ligne 10 : | Ligne 10 : | ||
|Statut de la documentation=Complète | |Statut de la documentation=Complète | ||
|Relecture de la documentation=Non vérifiée | |Relecture de la documentation=Non vérifiée | ||
| − | |Techniques= | + | |Techniques=esp, bluetooth |
|Durée de fabrication=de 16 à 32 h | |Durée de fabrication=de 16 à 32 h | ||
| − | |Coût matériel=De | + | |Coût matériel=De 100 à 200 euros |
|Niveau=Moyen | |Niveau=Moyen | ||
|Licence=by-sa | |Licence=by-sa | ||
| Ligne 20 : | Ligne 20 : | ||
}} | }} | ||
== Description du projet == | == Description du projet == | ||
| − | + | Jeu de lancer de boule sur cible inspiré du jeu de Gabaky,pour des mal-voyants ou non-voyants. Voir la descrption du jeu de Gabaky [[Projets_talk:C%C3%A9ci%27ble#Description_du_jeu_de_Gabaky|description du jeu de Gabaky]] | |
| − | |||
| − | |||
| − | + | ''Support pédagogique utilisant le dispositif ''<br> | |
| − | + | [[Supports peda:Mathématiques - La numération avec Céci'ble|Mathématiques - La numération avec Céci'ble]] : Activité niveau 6ème pour apprendre la numération en jouant avec le jeu d'adresse pour malvoyant Céci'ble (Gabaki pour malvoyant). | |
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
== Cahier des charges == | == Cahier des charges == | ||
| − | + | * trouver un système qui permet de récupérer la balle après le lancer | |
| − | + | * pouvoir jouer en autonomie | |
| − | + | * pouvoir jouer en intérieur | |
| − | * | + | * avoir un système automatique de calcul des points, et du résultat |
| − | * | ||
| − | * | ||
| − | * | ||
| − | |||
== Analyse de l'existant == | == Analyse de l'existant == | ||
| Ligne 69 : | Ligne 46 : | ||
== Matériel nécessaire == | == Matériel nécessaire == | ||
| − | ===Cible | + | ===Cible électronique=== |
====Electronique==== | ====Electronique==== | ||
* 1 carte Arduino Mega | * 1 carte Arduino Mega | ||
| − | * 1 Lidar TF Mini | + | * 1 Lidar TF Mini-S |
* 1 Module bluetooth HC05 | * 1 Module bluetooth HC05 | ||
* 1 Driver ULN2003A | * 1 Driver ULN2003A | ||
| Ligne 80 : | Ligne 57 : | ||
* 1 interrupteur glissière | * 1 interrupteur glissière | ||
* 1 buzzer | * 1 buzzer | ||
| − | * 1 | + | * 1 détecteur optique à fourche (voir liste ci-dessous du circuit du capteur à fourche optique) |
* 1 cordon USB A-B (connections à clarifier) | * 1 cordon USB A-B (connections à clarifier) | ||
| − | * 1 alimentation 5V : | + | * 1 alimentation 5V : batteries de 3.7V qui sortent du 5V avec réhausseur de tension intégrées avec chargeur incorporé |
* 1 convertisseur niveau logique 5V<=>3V(ref??) | * 1 convertisseur niveau logique 5V<=>3V(ref??) | ||
| − | ''' | + | |
| − | + | Le capteur optique permet d'assurer la position du calage intial du détecteur | |
| + | |||
| + | |||
| + | '''Composants du circuit du capteur à fourche optique''' | ||
* 2 résistances 4.7K | * 2 résistances 4.7K | ||
| Ligne 101 : | Ligne 81 : | ||
====Cible==== | ====Cible==== | ||
| − | * | + | * PVC expansé de 6mm d'épaisseur en 100cm X 100cm |
| − | * 4 couleurs de peintures contrastées | + | * 4 couleurs de peintures contrastées (de l'extérieur vers l'intérieur : bleu, jaune , noir, blanc, et partie hors anneaux en blanc) |
| − | |||
==Outils nécessaires== | ==Outils nécessaires== | ||
==Coût== | ==Coût== | ||
| − | + | Environ 200 euros | |
| − | |||
==Fichiers source== | ==Fichiers source== | ||
===Fichier de l'application Android=== | ===Fichier de l'application Android=== | ||
| − | Application pour smartphone Android [[:File: | + | Application pour smartphone Android [[:File:Cecible_v1_26_APK_AIA.zip |Télécharger l'application Android (APK) et le fichier source Appinventor (AIA)]] |
===Fichiers source cible lidar === | ===Fichiers source cible lidar === | ||
| − | Fichiers DXF du boitier pour l'électronique ( | + | Fichiers DXF du boitier pour l'électronique ("limule") (cible lidar) :pas encore réalisé |
| − | Fichiers STL | + | Fichiers STL, dxf et vue 3d des éléments pour l'électronique (cible lidar) : [[Media:STL_Lidar.zip|Télécharger les STL du boitier électronique cible lidar]] |
Plan de la cible (les anneaux peints de différentes couleurs) (cible lidar) | Plan de la cible (les anneaux peints de différentes couleurs) (cible lidar) | ||
| − | Code ESP32 pour cible lidar : [[:File:Cecible_ESP32_v1_26.zip|Télécharger le code | + | Code ESP32 pour cible lidar : [[:File:Cecible_ESP32_v1_26.zip|Télécharger le code source de la cible Lidar pour le téléverser sur la carte ESP32 (en C++ Arduino]] |
| − | Schéma électronique pour cible lidar : [[:File:Plan_Fritzing_Cecible_1_25.zip|Télécharger le schéma électronique]] | + | Schéma électronique sous Fritzing pour cible lidar : [[:File:Plan_Fritzing_Cecible_1_25.zip|Télécharger le schéma électronique]] |
===Fichiers source pour balle=== | ===Fichiers source pour balle=== | ||
| − | Patrons pour balle : [[Media:Balle_DXF.zip|Télécharger les fichiers DXF]] et [[Media:Balle_patrons_couture.zip|télécharger les patrons au format JPG]] | + | Patrons pour balle : [[Media:Balle_DXF.zip|Télécharger les fichiers DXF]] et [[Media:Balle_patrons_couture.zip|télécharger les patrons au format JPG et BMP]] |
| + | |||
| + | ===Fichiers source pour limule (boitier électronique)=== | ||
| + | [[Media:Cecible_limule_DXF.zip|Télécharger le DXF de la limule (boitier électronique]] | ||
| + | |||
| + | Pour visualiser le boitier : [[Media:Cecible_limule_STL.zip|Télécharger le STL de la limule]] ou | ||
| + | [[Media:Coque_limule_freecad.zip|Télécharger le fichier Freecad (3D) de la limule]] | ||
| + | |||
| + | Ajouter les STL de Christian pour tout ce qui est support à imprimer en 3D à l'intérieur du boitier. | ||
==Etapes de fabrication pas à pas== | ==Etapes de fabrication pas à pas== | ||
Deux prototypes de cible avec chacun un mode de détection propre ont été réalisés pour le projet. | Deux prototypes de cible avec chacun un mode de détection propre ont été réalisés pour le projet. | ||
| − | + | La détection de la balle sur la cible se fit grâce à un lidar placé dans un boitier contenant l'électronique (la limule) placé à l'angle de la cible. | |
| − | + | Cette cible fonctionne conjointement avec une application Android qui guide vocalement les joueurs pour attribuer les tours de chacun et donne le nombre de points. | |
| − | |||
| − | |||
===Fabrication de la balle=== | ===Fabrication de la balle=== | ||
| − | La méthode pour fabriquer la balle est la même pour la version électrique et lidar, sauf | + | La méthode pour fabriquer la balle est la même pour la version électrique et lidar, sauf que pour cette version, il n'y a pas l'étape qui consiste à recouvrir la balle de fil guipé inox afin de garantir que la balle soit conductrice. |
[[File:Balle_simple_DSC_6199.JPG|400px|thumb|left|500px|Balle pour cible lidar en tissus souple doux et élastique]] | [[File:Balle_simple_DSC_6199.JPG|400px|thumb|left|500px|Balle pour cible lidar en tissus souple doux et élastique]] | ||
| Ligne 154 : | Ligne 138 : | ||
[[Media:Balle_patrons_couture.zip|Télécharger les patrons]] visibles ci-dessous et les imprimer sur du papier épais | [[Media:Balle_patrons_couture.zip|Télécharger les patrons]] visibles ci-dessous et les imprimer sur du papier épais | ||
| − | On a donc 1 dessin d'un rectangle de | + | On a donc 1 dessin d'un rectangle de 280x89mm pour la partie centrale, et deux dessins de 2 cercles de diamètres 117mm extérieur pour la calotte haute et basse. |
======Découper les patrons ====== | ======Découper les patrons ====== | ||
| Ligne 225 : | Ligne 209 : | ||
<br clear=all> | <br clear=all> | ||
| − | ===== | + | =====Mise en place de la boucle en fil de parapente===== |
Faire une boucle avec le fil de parapente qu'on attache à la balle en cousant l'embase à l'intérieur et qu'on fait ressortir par l'ouverture restante. La boucle permet d'attacher la balle à la sangle (ou au ruban) qui permet à la personne de récupérer la balle sans se déplacer. | Faire une boucle avec le fil de parapente qu'on attache à la balle en cousant l'embase à l'intérieur et qu'on fait ressortir par l'ouverture restante. La boucle permet d'attacher la balle à la sangle (ou au ruban) qui permet à la personne de récupérer la balle sans se déplacer. | ||
| Ligne 237 : | Ligne 221 : | ||
La cible lidar a d'abord été développé sur Arduino Mega mais l'objectif final est de simplifier le prototype en le migrant sur ESP32. Nous laissons ici les sources pour Arduino Mega mais préférer la version ESP32 qui est la version finale à jour. | La cible lidar a d'abord été développé sur Arduino Mega mais l'objectif final est de simplifier le prototype en le migrant sur ESP32. Nous laissons ici les sources pour Arduino Mega mais préférer la version ESP32 qui est la version finale à jour. | ||
| − | ====Fabrication de la cible | + | ====Fabrication de la cible ==== |
| − | La cible du lidar a été matérialisée | + | La cible du lidar a été matérialisée avec du PVC expansé de 6mm d'épaisseur en 100cm X 100cm |
| − | |||
| − | + | '''Rayon des anneaux :''' 11.5 cm (rond blanc central), 24 cm (anneau noir), 37cm (anneau jaune), 50cm (anneau bleu). | |
| − | |||
[[File:Cible_lidar_small.JPG|700px]] | [[File:Cible_lidar_small.JPG|700px]] | ||
| Ligne 251 : | Ligne 233 : | ||
[[File:Cecible_detection_balle.jpg|700px]] | [[File:Cecible_detection_balle.jpg|700px]] | ||
| − | |||
| − | |||
====Schéma électronique de la cible version Lidar==== | ====Schéma électronique de la cible version Lidar==== | ||
Afin de garantir le bon fonctionnement du circuit, réaliser d'abord le circuit sur une breadboard. Pour un prototype pérenne, réaliser ensuite le circuit sur le PCB (téléchargeable dans le chapitre suivant). | Afin de garantir le bon fonctionnement du circuit, réaliser d'abord le circuit sur une breadboard. Pour un prototype pérenne, réaliser ensuite le circuit sur le PCB (téléchargeable dans le chapitre suivant). | ||
| − | =====Version sur ESP32===== | + | =====Version sur ESP32 à mettre à jour avec le Lidar TF mini S===== |
[[File:Cecible_ESP32_v1-25.jpg|700px|thumb|left|Schéma Fritzing]] | [[File:Cecible_ESP32_v1-25.jpg|700px|thumb|left|Schéma Fritzing]] | ||
| Ligne 265 : | Ligne 245 : | ||
'''Version obsolète''' (l'écran OLED retournait du 5V dans le circuit et a cramé l'esp32: | '''Version obsolète''' (l'écran OLED retournait du 5V dans le circuit et a cramé l'esp32: | ||
| − | [[Media:Cecible_Lidar_v1.zip|Télécharger les fichiers source Kicad pour fabriquer le circuit sur verobard (les trous sont dimensionnés pour sur le schéma)]] ou [[Media:Cecible_Lidar_v2.zip|Télécharger les fichiers source Kicad pour fabriquer le PCB ]] | + | [[Media:Cecible_Lidar_v1.zip|Télécharger les fichiers source Kicad pour fabriquer le circuit sur verobard (les trous sont dimensionnés pour sur le schéma)]] ou |
| + | |||
| + | [[Media:Cecible_Lidar_v2.zip|Télécharger les fichiers source Kicad pour fabriquer le PCB ]] | ||
| + | |||
[[Media:LIBRAIRIES.zip|Télécharger les librairies utilisées pour Kicad]] | [[Media:LIBRAIRIES.zip|Télécharger les librairies utilisées pour Kicad]] | ||
| − | ''' | + | '''Dossier Kicad mis à jour en Avril 2023 SCH, PCB et gerber du projet.''' |
| − | [[ | + | |
| + | '''Contient les dossiers Bloc Optique, Bloc Charge et Cecible Lidar : ''' | ||
| + | [[Media:Cecible_Lidar_v4_Gerber.zip|Télécharger le dossier fait sur Kicad]] | ||
| + | |||
| + | |||
| Ligne 304 : | Ligne 291 : | ||
[[File:cecible_lidar_v1_pcb_3D.png|700px]] | [[File:cecible_lidar_v1_pcb_3D.png|700px]] | ||
| − | |||
====Boitier pour l'électronique de la cible version Lidar==== | ====Boitier pour l'électronique de la cible version Lidar==== | ||
Fichiers DXF et fichiers STL à ajouter. Tous les angles doivent être arrondis pour ne pas risquer de percer la balle. Il ne faut aucun angle saillant. | Fichiers DXF et fichiers STL à ajouter. Tous les angles doivent être arrondis pour ne pas risquer de percer la balle. Il ne faut aucun angle saillant. | ||
==Application pour smartphone Android== | ==Application pour smartphone Android== | ||
| − | L'application exécutable sur des smartphones Android | + | L'application est exécutable sur des smartphones Android. |
Elle a été développée sur Appinventor. | Elle a été développée sur Appinventor. | ||
La version finale est à réaliser sur ESP32 de préférence car le bluetooth est intégré et cela simplifie le prototype. | La version finale est à réaliser sur ESP32 de préférence car le bluetooth est intégré et cela simplifie le prototype. | ||
Les évolutions de l'interface et application conformément au cahier des charges ne sont à jour que pour l'ESP32. | Les évolutions de l'interface et application conformément au cahier des charges ne sont à jour que pour l'ESP32. | ||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
===Interface=== | ===Interface=== | ||
| Ligne 329 : | Ligne 310 : | ||
<gallery widths="200px" heights="400px"> | <gallery widths="200px" heights="400px"> | ||
| − | File: | + | File:Screenshot_2023-06-19-14-20-59-53_1dd7f2a0edbfbd0a9f012ae40160b351.jpg|Spash-Screeen de l'appli Cecible sur smartphone |
| − | File: | + | |
| − | File: | + | File:Screenshot_2023-06-19-14-22-46-49_1dd7f2a0edbfbd0a9f012ae40160b351.jpg|Ecran de paramétrage de l'appli Cecible sur smartphone |
| + | |||
| + | File:Screenshot_2023-06-19-14-17-25-62_1dd7f2a0edbfbd0a9f012ae40160b351.jpg|Ecran d'aide de l'appli Cecible sur smartphone | ||
| + | |||
| + | File:Screenshot_2023-06-19-14-20-30-54_1dd7f2a0edbfbd0a9f012ae40160b351.jpg|Ecran de commandes du jeu de l'appli Cecible sur smartphone | ||
| + | |||
</gallery> | </gallery> | ||
| Ligne 364 : | Ligne 350 : | ||
[[Category:En cours]] | [[Category:En cours]] | ||
[[Category:Malvoyance]] | [[Category:Malvoyance]] | ||
| + | [[Category:Inauguration]] | ||
Version actuelle datée du 23 octobre 2024 à 11:46
| Céci'ble
| |
|---|---|
| Informations | |
| Description | Adapter le jeu Gabaky (mélange de jeu de cible et de jeu de palets) pour des mal-voyants ou non-voyants |
| Catégorie | Malvoyance |
| Etat d'avancement | Réalisés |
| Techniques | esp, bluetooth |
| Durée de fabrication | de 16 à 32 h |
| Coût matériel | De 100 à 200 euros |
| Niveau | Moyen |
| Licence | by-sa |
| Date de création | 2021-05-06 |
| Équipe | |
| Porteur de projet | Patrick, Pascal, Damien, André- |
| Contributeurs | AlainD, Elektron, Ylc, Eva, Rozen |
| Fabmanager | Delphine |
| Référent documentation | Delphine, Ylc |
| Partenaires: | Centre André Breton |
| Nom humanlab | Humanlab_MHK |
| Documentation | |
| Statut de la documentation | Complète |
| Relecture de la documentation | Non vérifiée |

Description du projet
Jeu de lancer de boule sur cible inspiré du jeu de Gabaky,pour des mal-voyants ou non-voyants. Voir la descrption du jeu de Gabaky description du jeu de Gabaky
Support pédagogique utilisant le dispositif
Mathématiques - La numération avec Céci'ble : Activité niveau 6ème pour apprendre la numération en jouant avec le jeu d'adresse pour malvoyant Céci'ble (Gabaki pour malvoyant).
Cahier des charges
- trouver un système qui permet de récupérer la balle après le lancer
- pouvoir jouer en autonomie
- pouvoir jouer en intérieur
- avoir un système automatique de calcul des points, et du résultat
Analyse de l'existant
Equipe (Porteur de projet et contributeurs)
- Porteurs du projet : Patrick, André, Pascal, Damien, (Malvoyants/Non voyants du centre André Breton)
- Concepteurs/contributeurs : Christian, Yves, Alain, Rozenn, Eva, Delphine
- Fabmanager référent:Delphine
- Responsable de documentation :Delphine
Matériel nécessaire
Cible électronique
Electronique
- 1 carte Arduino Mega
- 1 Lidar TF Mini-S
- 1 Module bluetooth HC05
- 1 Driver ULN2003A
- 1 moteur pas à pas 28byj-48 (https://cookierobotics.com/042/)
- 1 relais reed 10nF
- 2 interrupteurs fin de course
- 1 interrupteur glissière
- 1 buzzer
- 1 détecteur optique à fourche (voir liste ci-dessous du circuit du capteur à fourche optique)
- 1 cordon USB A-B (connections à clarifier)
- 1 alimentation 5V : batteries de 3.7V qui sortent du 5V avec réhausseur de tension intégrées avec chargeur incorporé
- 1 convertisseur niveau logique 5V<=>3V(ref??)
Le capteur optique permet d'assurer la position du calage intial du détecteur
Composants du circuit du capteur à fourche optique
- 2 résistances 4.7K
- 2 résistances 820R
- 1 résistance 22K
- 2 résistances 1K
- 1 résistance 10K
- 2 transistors BC337
- 1 condensateur céramique 10nF
- 1 condensateur céramique 100nF
- 1 connecteur 4 entrées
- 1 connecteur 3 entrées
- 1 LED 5mm verte
Cible
- PVC expansé de 6mm d'épaisseur en 100cm X 100cm
- 4 couleurs de peintures contrastées (de l'extérieur vers l'intérieur : bleu, jaune , noir, blanc, et partie hors anneaux en blanc)
Outils nécessaires
Coût
Environ 200 euros
Fichiers source
Fichier de l'application Android
Application pour smartphone Android Télécharger l'application Android (APK) et le fichier source Appinventor (AIA)
Fichiers source cible lidar
Fichiers DXF du boitier pour l'électronique ("limule") (cible lidar) :pas encore réalisé
Fichiers STL, dxf et vue 3d des éléments pour l'électronique (cible lidar) : Télécharger les STL du boitier électronique cible lidar
Plan de la cible (les anneaux peints de différentes couleurs) (cible lidar)
Code ESP32 pour cible lidar : Télécharger le code source de la cible Lidar pour le téléverser sur la carte ESP32 (en C++ Arduino
Schéma électronique sous Fritzing pour cible lidar : Télécharger le schéma électronique
Fichiers source pour balle
Patrons pour balle : Télécharger les fichiers DXF et télécharger les patrons au format JPG et BMP
Fichiers source pour limule (boitier électronique)
Télécharger le DXF de la limule (boitier électronique
Pour visualiser le boitier : Télécharger le STL de la limule ou Télécharger le fichier Freecad (3D) de la limule
Ajouter les STL de Christian pour tout ce qui est support à imprimer en 3D à l'intérieur du boitier.
Etapes de fabrication pas à pas
Deux prototypes de cible avec chacun un mode de détection propre ont été réalisés pour le projet.
La détection de la balle sur la cible se fit grâce à un lidar placé dans un boitier contenant l'électronique (la limule) placé à l'angle de la cible.
Cette cible fonctionne conjointement avec une application Android qui guide vocalement les joueurs pour attribuer les tours de chacun et donne le nombre de points.
Fabrication de la balle
La méthode pour fabriquer la balle est la même pour la version électrique et lidar, sauf que pour cette version, il n'y a pas l'étape qui consiste à recouvrir la balle de fil guipé inox afin de garantir que la balle soit conductrice.

Confection de la balle
Télécharger les fichiers DXF qui permettent de découper le patron de la balle avec une machine dans un tissus élastique. Si ce n'est pas possible suivre la méthode traditionnelle expliquée dans les paragraphes suivants.
Imprimer les patrons
Télécharger les patrons visibles ci-dessous et les imprimer sur du papier épais
On a donc 1 dessin d'un rectangle de 280x89mm pour la partie centrale, et deux dessins de 2 cercles de diamètres 117mm extérieur pour la calotte haute et basse.
Découper les patrons
Découper la partie extérieure du rectangle du patron "balle centre" .
Découper ensuite les deux cercles sur leurs diamètres extérieurs de 117mm et intérieurs, l'un avec un diamètre intérieur de 87 mm (qui représente le trait de coupe de la surjeteuse) et l'autre avec un diamètre intérieur de 77mm (qui représente le trait de couture) afin d'obtenir deux anneaux.



Préparation des morceaux de tissus
Méthode pour réussir ses tracés :
Poser le morceau de tissus élastique sur un support suffisament ferme pour que le crayon puisse tracer et assez souple pour que l'épingle puisse se planter dedans. (polystyrène, bois tendre, mousse etc ..)
A l'aide d'épingles, fixer le patron sur le tissus, et le support qui se trouve en dessous.
Faire les tracés sur les deux côtés du tissus !
La partie centrale de la balle :
Poser le patron rectangulaire sur le tissus et tracer d'abord le contour du rectangle, puis toutes les lignes horizontales et verticales. Décaler le patron légèrement sur la droite pour marquer le départ des lignes sur la partie gauche du patron et faire de même pour le côté droit afin de tracer les traits de chaque ligne. Procéder de manière identique pour les traits verticaux.
Seulement une fois tous les tracés effectués, procéder à la découpe extérieure du rectangle dans le tissus.
Les lignes horizontales servent de repères pour venir par la suite coudre notre fil guipé inox avec un point en forme de X (afin de garantir l'élasticité de la couture). Les lignes verticales servent de repères pour venir positionner les calottes sur les 12 traits qui divisent le cercle.





Les deux parties hautes et basses de la balle (les calottes) : Fixer l'anneau de diamètre intérieur de 77mm (le patron balle calotte 1) sur le tissus et le support. Tracer d'abord le diamètre extérieur, puis le diamètre intérieur. Tracer les 12 repères qui divisent l'anneaux sur le tissus. Sur ce même bout de tissus, enlever le patron balle calotte 1 et fixer le patron calotte 2 en s'alignant sur le diamètre extérieur déjà tracé, pour tracer le diamètre de 87 mm sur le tissus.
Répeter cette opération sur un deuxième bout de tissus afin d'obtenir les deux calottes de la balle.
Seulement une fois tous les tracés effectués, procéder à la découpe extérieure des cercles dans le tissus afin d'obtenir deux ronds de tissus pleins avec leurs tracés.



Assemblage des morceaux de tissus
On va maintenant faire le montage pour que les repères de séparation des calottes correspondent aux douzes repères des bandes supérieures et inférieures du rectangle de tissus. Pour y parvenir, on crée un tube avec le rectangle et on vient positionner la calotte haute puis la calotte basse

Sur les images on voit en pointillé les lignes qui permettent de positionner les morceaux de tissus entre-eux et les endroits que doit coudre la surjetteuse et couper le tissus.
Pour le montage, il faut faufiler dans l'espace de 15mm de hauteur en haut et bas de la partie centrale et dans l'espace situé entre les lignes séparées de 49mm. Positionner le fil de montage assez proche des lignes de couture et de coupe.
On ne met pas les fils de montage dans les deux lignes de 5mm de hauteur (on le positionne en dessous ou au dessus car c'est là que va coudre la machine, qui réalise un point en zig zag)
On se retrouve donc avec les deux calottes surfilées sur la partie rectangulaire. On n'a pas encore raccordé la partie verticale de notre rectangle, on a 240 mm de longueur or on a besoin de 200mm, les 20 mm de chaque coté viendront en recouvrement, c'est ce chevauchement qui empêchera le riz de sortir.
On peut alors coudre les parties entre elles à l'aide la surjeteuse tout en gardant la partie ouverte afin de nous permettre de remplir la balle.


Remplissage de la balle avec du riz rond
On remplit la balle de riz pour arriver à son poids idéal (300 grammes) sans pour l'instant coudre l'ouverture restante. Le mieux est d'utiliser une petite bouteille d'eau qu'on remplit de riz pour ensuite le reverser dans la balle.

Mise en place de la boucle en fil de parapente
Faire une boucle avec le fil de parapente qu'on attache à la balle en cousant l'embase à l'intérieur et qu'on fait ressortir par l'ouverture restante. La boucle permet d'attacher la balle à la sangle (ou au ruban) qui permet à la personne de récupérer la balle sans se déplacer.
Ensuite on remet la balle à l'endroit et on remplit de nouveau de riz. On peut alors terminer la couture manquante sur l'ouverture restante une fois que l'on est sûr que le poids idéal la balle est atteinte (environ 300 grammes)


Cible lidar
La cible lidar a d'abord été développé sur Arduino Mega mais l'objectif final est de simplifier le prototype en le migrant sur ESP32. Nous laissons ici les sources pour Arduino Mega mais préférer la version ESP32 qui est la version finale à jour.
Fabrication de la cible
La cible du lidar a été matérialisée avec du PVC expansé de 6mm d'épaisseur en 100cm X 100cm
Rayon des anneaux : 11.5 cm (rond blanc central), 24 cm (anneau noir), 37cm (anneau jaune), 50cm (anneau bleu).



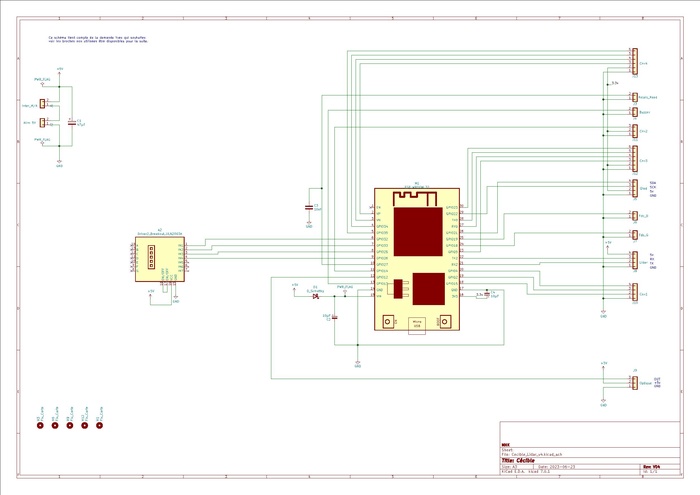
Schéma électronique de la cible version Lidar
Afin de garantir le bon fonctionnement du circuit, réaliser d'abord le circuit sur une breadboard. Pour un prototype pérenne, réaliser ensuite le circuit sur le PCB (téléchargeable dans le chapitre suivant).
Version sur ESP32 à mettre à jour avec le Lidar TF mini S


Schéma électronique et PCB Kicad pour version ESP32 (à mettre à jour au 13/04/2023)
Version obsolète (l'écran OLED retournait du 5V dans le circuit et a cramé l'esp32:
Télécharger les fichiers source Kicad pour fabriquer le PCB
Télécharger les librairies utilisées pour Kicad
Dossier Kicad mis à jour en Avril 2023 SCH, PCB et gerber du projet.
Contient les dossiers Bloc Optique, Bloc Charge et Cecible Lidar : Télécharger le dossier fait sur Kicad
Schéma électronique mis à jour en Avril 2023
PCB Composants mis à jour en Avril 2023

PCB soudures mis à jour en Avril 2023

Image de l'empreinte pour circuit sur veroboard (Non mis à jour en avril 2023)

Visualisation du PCB pour veroboard en 3D (Non mis à jour en avril 2023)

Boitier pour l'électronique de la cible version Lidar
Fichiers DXF et fichiers STL à ajouter. Tous les angles doivent être arrondis pour ne pas risquer de percer la balle. Il ne faut aucun angle saillant.
Application pour smartphone Android
L'application est exécutable sur des smartphones Android. Elle a été développée sur Appinventor.
La version finale est à réaliser sur ESP32 de préférence car le bluetooth est intégré et cela simplifie le prototype. Les évolutions de l'interface et application conformément au cahier des charges ne sont à jour que pour l'ESP32.
Interface
Interface pour version Arduino Mega (obsolète)

Interface pour version ESP32

Spash-Screeen de l'appli Cecible sur smartphone

Ecran de paramétrage de l'appli Cecible sur smartphone

Ecran d'aide de l'appli Cecible sur smartphone

Ecran de commandes du jeu de l'appli Cecible sur smartphone




Fabrication de la pochette pour le téléphone
Voici le masque de l'écran à positionner sur le Samsung S7
Surcoque pour Xiaomi A1
Télécharger le fichier STL à imprimer pour faire une surcoque sur la coque du téléphone afin d'y glisser le masque découpé dans du plexiglas fin (1mm d'épaisseur) avec des trous à l'emplacement des touches sur l'application Cécible.


Masque pour Xiaomi A1
Télécharger le fichier DXF à découper dans du PMMA 1mm d'épaisseur
Fabrication du sabot pour se positionner face à la cible


Durée de fabrication du prototype final
Couleurs pour nouvelle peinture
De l'intérieur vers l'extérieur : blanc, noir, jaune, bleu et contour blanc