Différences entre versions de « Projets:Détecteur de recul »
| (27 versions intermédiaires par 2 utilisateurs non affichées) | |||
| Ligne 1 : | Ligne 1 : | ||
{{Infobox projet | {{Infobox projet | ||
| − | |Description=Détecteur de recul pour fauteuil PMR | + | |Image principale=Schéma montage radar recul.jpg |
| + | |Description=Détecteur de recul pour fauteuil PMR avec indicateur sonore | ||
|Porteur de projet=Mathilde | |Porteur de projet=Mathilde | ||
|Contributeurs=Elektron, Ylc | |Contributeurs=Elektron, Ylc | ||
| Ligne 9 : | Ligne 10 : | ||
|Statut de la documentation=Partielle | |Statut de la documentation=Partielle | ||
|Relecture de la documentation=Non vérifiée | |Relecture de la documentation=Non vérifiée | ||
| + | |Techniques=esp, impression 3d, électronique | ||
|Durée de fabrication=de 4 à 8 h | |Durée de fabrication=de 4 à 8 h | ||
|Coût matériel=De 50 à 100 euros | |Coût matériel=De 50 à 100 euros | ||
| Ligne 38 : | Ligne 40 : | ||
== Cahier des charges == | == Cahier des charges == | ||
| + | Détecter les obstacles à l'arrière du fauteuil pour éviter de les heurter! | ||
== Analyse de l'existant et liens utiles== | == Analyse de l'existant et liens utiles== | ||
| Ligne 54 : | Ligne 57 : | ||
==Fichiers source== | ==Fichiers source== | ||
| + | * [[Media:détecteur_recul_STL.zip|Télécharger les fichiers STL à imprimer]] | ||
| + | * [[Media:Detect_recul_V4.zip|Télécharger le code ESP32]] | ||
==Etapes de fabrication pas à pas== | ==Etapes de fabrication pas à pas== | ||
| + | === Impression 3D === | ||
| + | [[Media:détecteur_recul_STL.zip|Télécharger les fichiers STL]] et les imprimer en 3D. | ||
| + | |||
| + | |||
| + | <gallery widths="400px" heights="300px"> | ||
| + | File:Sens_impression.jpg|Sens dans lequel les éléments à imprimer doivent être posés sur le plateau. L’impression peut se faire élément par élément. | ||
| + | File:support_Detect_recul_img1.jpg|Pièces support formant la bague de fixation au vérin de commande de l’inclinaison du fauteuil, (impression côté plat vers le plateau). Les deux pieces sont reliées par 2 boulons et écrous de 5mm. | ||
| + | </gallery> | ||
| + | |||
===Schéma de montage=== | ===Schéma de montage=== | ||
| − | [[File:schema_montage_radar_recul.jpg| | + | [[File:schema_montage_radar_recul.jpg|700px|vignette|gauche|Schéma de montage]] |
| + | |||
| + | <br clear=all> | ||
| + | |||
| + | === Téleverser le code sur l'ESP32 === | ||
| + | * [[Media:Detect_recul_V4.zip|Télécharger le code ESP32]] et le placer dans le dossier des projets Arduino | ||
| + | * Ouvrir avec l'IDE Arduino le sketch Detect_Recul_v4.ino | ||
| + | * Téléverser le code sur l'ESP 32 | ||
| + | |||
| + | ===Montage du circuit dans le boitier=== | ||
| + | * Monter le boitier avec les pièces imprimées. | ||
| + | Le support fixé au vérin est collé sous la partie basse du boitier (cyanoacrylate). | ||
| + | Les rails de fixation du PCB sont collés eux aussi à la cyanoacrylate dans la partie basse du boitier en tenant compte de la largeur du PCB. | ||
| + | |||
| + | <gallery widths="400px" heights="300px"> | ||
| + | File:Buzzer_v4_img1.jpg | ||
| + | File:Buzzer_v4_img2.jpg | ||
| + | </gallery> | ||
| + | |||
| + | <br clear=all> | ||
| + | |||
| + | * Intégrer le circuit électronique dans le boitier | ||
| + | [[File:Schéma montage radar recul.jpg|vignette|gauche|700px|Schéma du montage du boitier avec l'électronique]] | ||
| + | |||
| + | <br clear=all> | ||
| + | |||
| + | === Note technique === | ||
| + | |||
| + | Le système fonctionne même si le fauteuil est incliné vers l’avant ou vers l’arrière. L’effet induit par la gravité sur l’accélération linéaire du fauteuil est automatiquement compensé de façon à ce que le mouvement soit réellement détecté dès le déplacement du fauteuil. | ||
| + | |||
| + | |||
| + | Le système se recalibre automatiquement au fil de l’eau, même sur un plan incliné sauf si le fauteuil est incliné sur un côté avec un dévers de plus de 10°. Auquel cas il fonctionne toujours mais ne se recalibre pas tant qu’on reste dans cette position. | ||
| + | |||
| + | |||
| + | Le détecteur n’est pas obligatoirement posé tout à l’arrière du fauteuil. On peut le fixer sur le montant du dossier par exemple et, lors du montage, on entre dans le programme la longueur de retrait du détecteur par rapport à l’extrémité arrière du fauteuil. | ||
==Retours utilisateurs== | ==Retours utilisateurs== | ||
Version actuelle datée du 4 décembre 2023 à 16:49
| Détecteur de recul
| |
|---|---|
| Informations | |
| Description | Détecteur de recul pour fauteuil PMR avec indicateur sonore |
| Catégorie | Mobilité |
| Etat d'avancement | En cours |
| Techniques | esp, impression 3d, électronique |
| Durée de fabrication | de 4 à 8 h |
| Coût matériel | De 50 à 100 euros |
| Niveau | Facile |
| Licence | by-sa |
| Date de création | 2023-11-28 |
| Équipe | |
| Porteur de projet | Mathilde |
| Contributeurs | Elektron, Ylc |
| Fabmanager | Delphine |
| Référent documentation | Delphine, Ylc |
| Nom humanlab | Humanlab_MHK |
| Documentation | |
| Statut de la documentation | Partielle |
| Relecture de la documentation | Non vérifiée |

Description du projet
Ce système devrait plus exactement s’appeler « détecteur d’obstacle arrière pendant le recul ». Il fonctionne comme le « radar de recul » qui équipe les voitures en bipant plus ou moins rapidement selon l’éloignement de l’obstacle par rapport à l’arrière du fauteuil.
La détection d’un déplacement avant-arrière du fauteuil est faite par une centrale inertielle CMPS12. Lorsque le fauteuil ne bouge pas, aucune détection d’obstacle n’est faite.
Dès que le fauteuil se déplace cela déclenche la mise en route des 2 capteurs infrarouge VL53L1X qui émettent un rayon de faible puissance pour détecter l’éventuelle présence d’un obstacle derrière le fauteuil.
Ainsi, si le fauteuil est arrêté, toute personne passant derrière lui ne déclenche aucune alarme.
Les 2 capteurs infrarouge sont orientés de façon à couvrir un angle de 60° vers l’arrière. Il serait toutefois posible de les monter en parrallèle de chaque coté du fauteuil par exemple sans modifier le logiciel. C’est la distance la plus courte mesurée par l’un des deux capteurs qui déclenche l’alarme lorsqu’elle est dans la plage surveillée.
NB : Les capteurs VL53L1X sont réglés en mode « short » ce qui leur donne une profondeur de mesure jusqu’à 135mm. Mais il est possible, selon le choix de l’utilisateur, de régler une distance plus courte au-delà de laquelle aucune alarme ne se déclenche. (p.ex. 900 mm).
Lorsqu’un obstacle est détecté dans le champ de surveillance, un buzzer émet des bips à une fréquence d’autant plus rapide que le fauteuil se rapproche de l’obstacle. Si le fauteuil est très proche de l’obtacle, le buzzer émet un son en continu.
La tonalité du buzzer peut être réglée par l’utilisateur à l’aide d’un potentiomètre dans la plage de 60 à 4000 Hz.
De même la sensibilité de la détection d’un déplacement peut être réglée par un second potentiomètre dans une plage de 0,1 m/s2 à 10 m/s2 (C’est l’accélération qui est mesurée).
Cahier des charges
Détecter les obstacles à l'arrière du fauteuil pour éviter de les heurter!
Analyse de l'existant et liens utiles
Matériel
- 1 microcontrôleur ESP32 30 pins
- 1 centrale inertielle CMPS12
- 2 capteurs laser VL53L1X
- 1 buzzer piezzo
- 2 pot. 10 KΩ
- 1 condensateur chimique 10 μF
Outils
Coût
Fichiers source
Etapes de fabrication pas à pas
Impression 3D
Télécharger les fichiers STL et les imprimer en 3D.
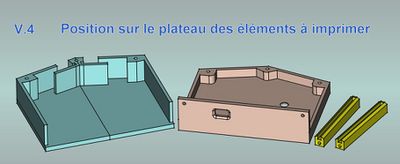
Sens dans lequel les éléments à imprimer doivent être posés sur le plateau. L’impression peut se faire élément par élément.
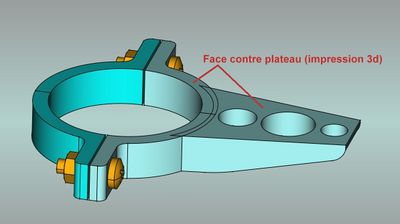
Pièces support formant la bague de fixation au vérin de commande de l’inclinaison du fauteuil, (impression côté plat vers le plateau). Les deux pieces sont reliées par 2 boulons et écrous de 5mm.


Schéma de montage

Téleverser le code sur l'ESP32
- Télécharger le code ESP32 et le placer dans le dossier des projets Arduino
- Ouvrir avec l'IDE Arduino le sketch Detect_Recul_v4.ino
- Téléverser le code sur l'ESP 32
Montage du circuit dans le boitier
- Monter le boitier avec les pièces imprimées.
Le support fixé au vérin est collé sous la partie basse du boitier (cyanoacrylate). Les rails de fixation du PCB sont collés eux aussi à la cyanoacrylate dans la partie basse du boitier en tenant compte de la largeur du PCB.


- Intégrer le circuit électronique dans le boitier
Note technique
Le système fonctionne même si le fauteuil est incliné vers l’avant ou vers l’arrière. L’effet induit par la gravité sur l’accélération linéaire du fauteuil est automatiquement compensé de façon à ce que le mouvement soit réellement détecté dès le déplacement du fauteuil.
Le système se recalibre automatiquement au fil de l’eau, même sur un plan incliné sauf si le fauteuil est incliné sur un côté avec un dévers de plus de 10°. Auquel cas il fonctionne toujours mais ne se recalibre pas tant qu’on reste dans cette position.
Le détecteur n’est pas obligatoirement posé tout à l’arrière du fauteuil. On peut le fixer sur le montant du dossier par exemple et, lors du montage, on entre dans le programme la longueur de retrait du détecteur par rapport à l’extrémité arrière du fauteuil.