Différences entre versions de « Projets:Épaul'moi »
| (22 versions intermédiaires par 4 utilisateurs non affichées) | |||
| Ligne 1 : | Ligne 1 : | ||
==Description du projet== | ==Description du projet== | ||
| − | Je souffre d'une vision en tunnel. Mes déplacements dans un milieu public sont donc difficiles puisque je ne distingue pas les personnes | + | Je souffre d'une vision en tunnel. Mes déplacements dans un milieu public sont donc difficiles puisque je ne distingue pas les personnes arrivant sur ma gauche ou ma droite. Je cherche donc un complément à la canne afin de libérer ma concentration lors de mes déplacements. En partant du projet "VIBRALERT" développé par des étudiants, j'envisageais un système me prévenant de la proximité de personnes en mouvement à ma gauche et à ma droite. |
| − | + | Le projet Epaul'moi lancé avec l'équipe de bénévoles de My Human Kit est basé sur la pose de 2 capteurs placés sur les épaules et reliés à 2 vibreurs placés au niveau des pectoraux, partie sensible du corps. Nous avons abandonné la liaison bluetooth avec des capteurs sur les poignets pour des raisons de consommation d'énergie. | |
==Cahier des charges== | ==Cahier des charges== | ||
Il s'agit de réaliser un système portatif et open source de radar adapté à la détection d'obstacles pour non et mal voyants : | Il s'agit de réaliser un système portatif et open source de radar adapté à la détection d'obstacles pour non et mal voyants : | ||
| − | * | + | * Peu couteux |
| − | * | + | * Open source |
| − | * | + | * Avec un retour ne demandant aucune attention, très intuitif, par des vibrations au niveau des pectoraux |
| − | * | + | * Avec une détection au moins sur 120° à gauche et à droite de l'utilisateur (ici pour un usager à vision tubulaire) |
| − | * | + | * Avec un système simple d'équipement sur vêtements sans modifier les vêtements |
| − | * | + | * Ne blessant pas les personnes autour (par exemple laser) |
| − | * | + | * Porté au niveau des épaules |
| − | * | + | * Refabricable dans un fablab ou un atelier de fabrication numérique |
| − | * | + | * Pratique, donc avec un système de cablage peu encombrant et facile à connecter |
| − | * | + | * Esthétique |
| − | * | + | * Documenté |
| − | * | + | * Etanche |
| − | * | + | * Une faible consommation d'énergie pour une meilleure autonomie |
| − | * | + | * A la fois commercialisable et open source, car l'équipe vibralert pourrait créer une offre en complément de la mise à disposition des sources. |
===Précisions lors du hackathon=== | ===Précisions lors du hackathon=== | ||
| − | *Priorité: détection de choses/personnes en mouvement dans conditions | + | * Priorité : détection de choses/personnes en mouvement dans des conditions d'affluence |
| − | *Placement du dispositif : tête ou épaules? | + | * Placement du dispositif : tête ou épaules ? |
| − | **Tête: | + | **Tête : information reçue plus pertinente car relative à la position de la tête |
| − | **Epaules: | + | **Epaules : l'information reçue ne sera forcément pertinente car position absolue et donc réception d'informations déjà dans le champs de vision |
| − | *Vibration ou son pour alerter? | + | * Vibration ou son pour alerter ? |
| − | *Angle de détection suffisant: 120° | + | * Angle de détection suffisant : 120° |
| − | * | + | * Temps de réponse rapide des capteurs |
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| + | ===Les étapes réalisée lors du hackathon=== | ||
| + | * Test capteur PIR : capteur avec un temps de réponse trop long et aléatoire | ||
| + | * Test capteur radar doppler : trop sensible, trop d'echo | ||
| + | * Test vibreur sur pectoraux : ok alimentation 3 volts du vibreur à 55mA | ||
| + | * En recherche de capteurs permettant d'inclure des infos en matière de distance et de mouvement | ||
==Analyse de l'existant== | ==Analyse de l'existant== | ||
| − | L'équipe de créateurs du projet | + | L'équipe de créateurs du projet [http://sleduc27.wixsite.com/vibralert Vibralet a conçu un radar pour non ou mal voyants avec alerte par vibrations au poignet]. Les équipes de My Human Kit et de Vibralert se sont rencontrées pour effectuer ensemble une animation autour du handicap au Collège de la Petite Lande de Rezé avec Michel Fréard, pionnier des croisements entre handicap, numérique et éducation volontaire de l'association avec [http://petitelande-reze.loire-atlantique.e-lyco.fr/decouvrons-le-college/du-cote-du-fse/club-human-lab-my-human-kit-/blog.do son club humanlab]. Suite à cette rencontre, l'équipe Vibralert a décidé de verser en open source une version de son prototype, et une collaboration est lancée entre Olivier Romer, l'équipe Vibralert et My Human Kit (qui soutient les projets si ils sont open-source et si un usager concerné est au centre de la réalisation). |
| − | + | Une documentation sur le gant sonar : https://fr.flossmanuals.net/fabrikarium-2016/sonar-glove/ et http://myhumankit.org/tutoriels/gant-sonar-ultrason-version-3d-print/ | |
Lors d'une journée de sensibilisation au handicap organisée avec Keolis Rennes, l'opérateur de transports en commun de Rennes Métropole, nous avons rencontré la coordinatrice de l'association Handicap 35 qui nous a présenté une personne munie d'une canne électronique et du dispositif @Minitact. | Lors d'une journée de sensibilisation au handicap organisée avec Keolis Rennes, l'opérateur de transports en commun de Rennes Métropole, nous avons rencontré la coordinatrice de l'association Handicap 35 qui nous a présenté une personne munie d'une canne électronique et du dispositif @Minitact. | ||
| + | ==Commande du vibreur== | ||
| + | |||
| + | Le vibreur est commandé par une sortie de l’arduino, mais le courant de sortie de celle-ci n’est pas suffisant (20 mA). En outre, la tension d’alimentation de l’ensemble est de 5VDC, nous devons donc nous servir d’une interface pour pouvoir alimenter le vibreur. | ||
| + | |||
| + | Nous commençons dans un premier temps par vérifier si le vibreur peut fonctionner avec des tensions d’alimentation inférieures grâce à une alimentation stabilisée pour ainsi connaître le courant nécessaire : | ||
| + | |||
| + | [[File:Commande vibreur.pdf|700px]] | ||
| + | |||
| + | En dessous de 2V, il n’y a pas assez de vibrations. | ||
| + | |||
| + | ===Les interfaces=== | ||
| + | |||
| + | Plusieurs possibilités de commande de puissance sont possibles (transistors, relais, optocoupleur, carte arduino de puissance…), nous commencerons par tester le transistor : | ||
| + | |||
| + | ===Le transistor NPN=== | ||
| + | |||
| + | [[File:Commande transistor NPN.pdf|thumb|left|Schéma de principe d’une commande de puissance d’un transistor NPN]] | ||
| + | |||
| + | Principe de fonctionnement : quand la sortie de l’Arduino est commandée, un courant circule à travers la base du transistor, ce qui lui permet de réagir comme un interrupteur. Le vibreur est alors alimenté. | ||
| + | |||
| + | '''Calcul de R1''' : | ||
| + | La somme des tensions Ur1, Uce et Um est égale à tension d’alimentation (5V), la loi d’ohm sert au calcul de R1 : | ||
| + | Ur1 + Uce + Um = 5 et Ur1 = R1 * I | ||
| + | |||
| + | R1 = (5 – Uce – Um) / I | ||
| + | |||
| + | Pour Um = 4V => R1 = 0,3 / 0,075 = 4 ohms, valeur normalisée : 3,9 ohms 1/4W | ||
| + | |||
| + | Pour Um = 3V => R1 = 1,3 / 0,055 = 24 ohms, valeur normalisée : 22 ohms 1/4W | ||
| + | |||
| + | Pour Um = 2V => R1 = 2,3 / 0,035 = 66 ohms, valeur normalisée : 68 ohms1/4W | ||
| + | |||
| + | '''Calcul de R2''' : | ||
| + | Le transistor est utilisé en commutation, une donnée technique du composant (hfe) est nécessaire, c’est la valeur minimale pour être sûr d’être dans la fonction voulue. | ||
| + | Le hfe est le rapport entre le courant d’émetteur et celui de la base (Ie / Ib). Si on fixe Ib à 1 mA, nous serons forcément en commutation car le hfe est autour de 150 pour un transistor commun. | ||
| + | |||
| + | La tension de sortie de l’arduino est égale à la somme Ur2, Ube et Um avec : | ||
| + | Ube = 0,3V. | ||
| + | |||
| + | Uout = Ur2 + Ube + Um et Ur2 = R2 * Ib | ||
| + | |||
| + | R2 = (5 – Ube – Um) / Ib | ||
| + | |||
| + | Pour Um = 4V => R2 = 0,7 / 0,001 = 7 ohms, valeur normalisée : 6,8 ohms 1/4W | ||
| + | |||
| + | Pour Um = 3V => R2 = 1,7 / 0,001 = 17 ohms, valeur normalisée : 18 ohms 1/4W | ||
| + | |||
| + | Pour Um = 2V => R2 = 2,7 / 0,001 = 27 ohms, valeur normalisée : 27 ohms 1/4W | ||
| + | |||
| + | |||
| + | Après avoir testé le vibreur avec les différentes tensions d’alimentation sur l’utilisateur, il s’avère qu'il ne vibre pas assez, nous devons donc rester sur ces caractéristiques (5V 100 mA). | ||
| + | |||
| + | Nous envisageons l’utilisation d’un transistor à effet de champs (MOSFET). | ||
| + | |||
| + | ===Le transistor à effet de champs à canal N=== | ||
| + | |||
| + | Principe de fonctionnement du transistor à effet de champs à grille isolé : | ||
| + | |||
| + | La principale différence avec un transistor NPN se situe sur le circuit de commande (grille source) : celui-ci présente une très grande impédance (résistance) d’entrée. Il est commandé en tension sur VGS contrairement au bipolaire qui l’était en courant par le courant de base. | ||
| + | |||
| + | Le principal avantage du transistor MOSFET est donc de pouvoir maintenir un état donné sans avoir à fournir de puissance (courant d’entrée nul ou très faible). Ce composant est surtout utilisé en commutation que ce soit pour l’électronique de puissance ou pour la réalisation de circuit numérique. Le transistor MOSFET à canal N se commande avec une tension grille source Vgs positive qui provoque la circulation d’un courant dans le sens drain source. Lorsque la tension VGS est nulle le courant de drain l’est aussi. | ||
| + | |||
| + | Un pont diviseur de tension (R1 et R2) sert à fixer le potentiel sur la grille (Vgs), le courant passe alors du drain vers la source, alimentant le vibreur. | ||
| + | |||
| + | '''Calcul de R1 et R2''' | ||
| + | |||
| + | Les résistances servent à fixer un potentiel sur la borne G du MOSFET, nous mettons des valeurs importantes pour ne pas avoir trop de puissance consommée. Nous fixons R2 à 100 kohms, R1 sera calculée en fonction des essais effectués ultérieurement (à priori 100 kohms selon les caractéristiques du transistor utilisé) pour obtenir approximativement 2,5V sur la grille du transistor. | ||
| + | |||
| + | Schéma de principe utilisé pour les essais. | ||
| + | |||
| + | [[File:Commande MOSFET.pdf|700px]] | ||
| + | |||
| + | Nous avons utilisé les valeurs suivantes pour les composants P, R1 et R2 : | ||
| + | P = 100kohms ; R1 = 10kohms et R2 = 100kohms. | ||
| + | |||
| + | Quand la tension sur R2 est suffisante, le canal entre le drain et la source est ouvert, le vibreur (M) fonctionne. Un ampèremètre est mis dans le circuit du vibreur pour visualiser le courant jusqu’à la valeur voulue. | ||
| + | |||
| + | Pour trouver la valeur de R1 : le potentiomètre est réglé pour une valeur de 0 ohm lors de la mise sous tension, puis augmenté de façon à avoir un courant de 100mA à travers le vibreur. | ||
| + | |||
| + | Ensuite, nous débranchons le tout pour mesurer la résistance du potentiomètre à ajouter à la valeur de R1, ce qui nous donne 5,5 kohms, soit la valeur de 15,5kohms (15kohms en valeur normalisée). | ||
| + | |||
| + | Nous remplaçons donc l’ensemble P et R1 par une résistance de cette valeur, et nous testons le bon fonctionnement pour entériner le schéma. | ||
= Canne électronique (c) Tom Pouce = | = Canne électronique (c) Tom Pouce = | ||
| Ligne 102 : | Ligne 183 : | ||
[[Category:Projets]] | [[Category:Projets]] | ||
| + | [[Category:En cours]] | ||
| + | [[Category:Abandonnés]] | ||
| + | [[Category:Malvoyance]] | ||
Version actuelle datée du 27 juillet 2022 à 11:12
Description du projet
Je souffre d'une vision en tunnel. Mes déplacements dans un milieu public sont donc difficiles puisque je ne distingue pas les personnes arrivant sur ma gauche ou ma droite. Je cherche donc un complément à la canne afin de libérer ma concentration lors de mes déplacements. En partant du projet "VIBRALERT" développé par des étudiants, j'envisageais un système me prévenant de la proximité de personnes en mouvement à ma gauche et à ma droite.
Le projet Epaul'moi lancé avec l'équipe de bénévoles de My Human Kit est basé sur la pose de 2 capteurs placés sur les épaules et reliés à 2 vibreurs placés au niveau des pectoraux, partie sensible du corps. Nous avons abandonné la liaison bluetooth avec des capteurs sur les poignets pour des raisons de consommation d'énergie.
Cahier des charges
Il s'agit de réaliser un système portatif et open source de radar adapté à la détection d'obstacles pour non et mal voyants :
- Peu couteux
- Open source
- Avec un retour ne demandant aucune attention, très intuitif, par des vibrations au niveau des pectoraux
- Avec une détection au moins sur 120° à gauche et à droite de l'utilisateur (ici pour un usager à vision tubulaire)
- Avec un système simple d'équipement sur vêtements sans modifier les vêtements
- Ne blessant pas les personnes autour (par exemple laser)
- Porté au niveau des épaules
- Refabricable dans un fablab ou un atelier de fabrication numérique
- Pratique, donc avec un système de cablage peu encombrant et facile à connecter
- Esthétique
- Documenté
- Etanche
- Une faible consommation d'énergie pour une meilleure autonomie
- A la fois commercialisable et open source, car l'équipe vibralert pourrait créer une offre en complément de la mise à disposition des sources.
Précisions lors du hackathon
- Priorité : détection de choses/personnes en mouvement dans des conditions d'affluence
- Placement du dispositif : tête ou épaules ?
- Tête : information reçue plus pertinente car relative à la position de la tête
- Epaules : l'information reçue ne sera forcément pertinente car position absolue et donc réception d'informations déjà dans le champs de vision
- Vibration ou son pour alerter ?
- Angle de détection suffisant : 120°
- Temps de réponse rapide des capteurs
Les étapes réalisée lors du hackathon
- Test capteur PIR : capteur avec un temps de réponse trop long et aléatoire
- Test capteur radar doppler : trop sensible, trop d'echo
- Test vibreur sur pectoraux : ok alimentation 3 volts du vibreur à 55mA
- En recherche de capteurs permettant d'inclure des infos en matière de distance et de mouvement
Analyse de l'existant
L'équipe de créateurs du projet Vibralet a conçu un radar pour non ou mal voyants avec alerte par vibrations au poignet. Les équipes de My Human Kit et de Vibralert se sont rencontrées pour effectuer ensemble une animation autour du handicap au Collège de la Petite Lande de Rezé avec Michel Fréard, pionnier des croisements entre handicap, numérique et éducation volontaire de l'association avec son club humanlab. Suite à cette rencontre, l'équipe Vibralert a décidé de verser en open source une version de son prototype, et une collaboration est lancée entre Olivier Romer, l'équipe Vibralert et My Human Kit (qui soutient les projets si ils sont open-source et si un usager concerné est au centre de la réalisation).
Une documentation sur le gant sonar : https://fr.flossmanuals.net/fabrikarium-2016/sonar-glove/ et http://myhumankit.org/tutoriels/gant-sonar-ultrason-version-3d-print/
Lors d'une journée de sensibilisation au handicap organisée avec Keolis Rennes, l'opérateur de transports en commun de Rennes Métropole, nous avons rencontré la coordinatrice de l'association Handicap 35 qui nous a présenté une personne munie d'une canne électronique et du dispositif @Minitact.
Commande du vibreur
Le vibreur est commandé par une sortie de l’arduino, mais le courant de sortie de celle-ci n’est pas suffisant (20 mA). En outre, la tension d’alimentation de l’ensemble est de 5VDC, nous devons donc nous servir d’une interface pour pouvoir alimenter le vibreur.
Nous commençons dans un premier temps par vérifier si le vibreur peut fonctionner avec des tensions d’alimentation inférieures grâce à une alimentation stabilisée pour ainsi connaître le courant nécessaire :
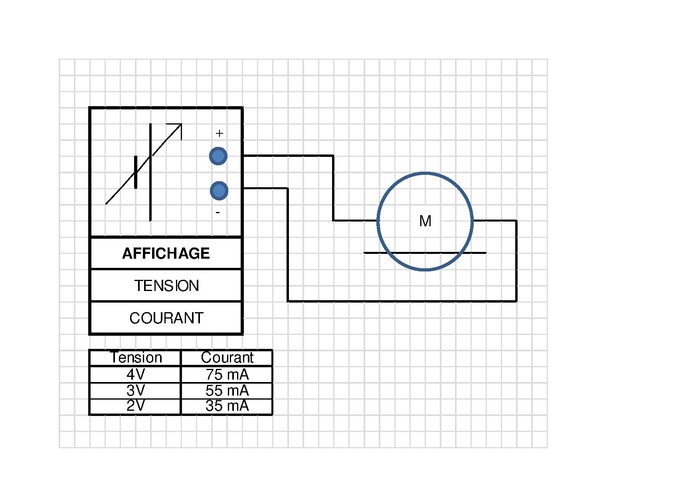
En dessous de 2V, il n’y a pas assez de vibrations.
Les interfaces
Plusieurs possibilités de commande de puissance sont possibles (transistors, relais, optocoupleur, carte arduino de puissance…), nous commencerons par tester le transistor :
Le transistor NPN
Principe de fonctionnement : quand la sortie de l’Arduino est commandée, un courant circule à travers la base du transistor, ce qui lui permet de réagir comme un interrupteur. Le vibreur est alors alimenté.
Calcul de R1 : La somme des tensions Ur1, Uce et Um est égale à tension d’alimentation (5V), la loi d’ohm sert au calcul de R1 : Ur1 + Uce + Um = 5 et Ur1 = R1 * I
R1 = (5 – Uce – Um) / I
Pour Um = 4V => R1 = 0,3 / 0,075 = 4 ohms, valeur normalisée : 3,9 ohms 1/4W
Pour Um = 3V => R1 = 1,3 / 0,055 = 24 ohms, valeur normalisée : 22 ohms 1/4W
Pour Um = 2V => R1 = 2,3 / 0,035 = 66 ohms, valeur normalisée : 68 ohms1/4W
Calcul de R2 : Le transistor est utilisé en commutation, une donnée technique du composant (hfe) est nécessaire, c’est la valeur minimale pour être sûr d’être dans la fonction voulue. Le hfe est le rapport entre le courant d’émetteur et celui de la base (Ie / Ib). Si on fixe Ib à 1 mA, nous serons forcément en commutation car le hfe est autour de 150 pour un transistor commun.
La tension de sortie de l’arduino est égale à la somme Ur2, Ube et Um avec : Ube = 0,3V.
Uout = Ur2 + Ube + Um et Ur2 = R2 * Ib
R2 = (5 – Ube – Um) / Ib
Pour Um = 4V => R2 = 0,7 / 0,001 = 7 ohms, valeur normalisée : 6,8 ohms 1/4W
Pour Um = 3V => R2 = 1,7 / 0,001 = 17 ohms, valeur normalisée : 18 ohms 1/4W
Pour Um = 2V => R2 = 2,7 / 0,001 = 27 ohms, valeur normalisée : 27 ohms 1/4W
Après avoir testé le vibreur avec les différentes tensions d’alimentation sur l’utilisateur, il s’avère qu'il ne vibre pas assez, nous devons donc rester sur ces caractéristiques (5V 100 mA).
Nous envisageons l’utilisation d’un transistor à effet de champs (MOSFET).
Le transistor à effet de champs à canal N
Principe de fonctionnement du transistor à effet de champs à grille isolé :
La principale différence avec un transistor NPN se situe sur le circuit de commande (grille source) : celui-ci présente une très grande impédance (résistance) d’entrée. Il est commandé en tension sur VGS contrairement au bipolaire qui l’était en courant par le courant de base.
Le principal avantage du transistor MOSFET est donc de pouvoir maintenir un état donné sans avoir à fournir de puissance (courant d’entrée nul ou très faible). Ce composant est surtout utilisé en commutation que ce soit pour l’électronique de puissance ou pour la réalisation de circuit numérique. Le transistor MOSFET à canal N se commande avec une tension grille source Vgs positive qui provoque la circulation d’un courant dans le sens drain source. Lorsque la tension VGS est nulle le courant de drain l’est aussi.
Un pont diviseur de tension (R1 et R2) sert à fixer le potentiel sur la grille (Vgs), le courant passe alors du drain vers la source, alimentant le vibreur.
Calcul de R1 et R2
Les résistances servent à fixer un potentiel sur la borne G du MOSFET, nous mettons des valeurs importantes pour ne pas avoir trop de puissance consommée. Nous fixons R2 à 100 kohms, R1 sera calculée en fonction des essais effectués ultérieurement (à priori 100 kohms selon les caractéristiques du transistor utilisé) pour obtenir approximativement 2,5V sur la grille du transistor.
Schéma de principe utilisé pour les essais.
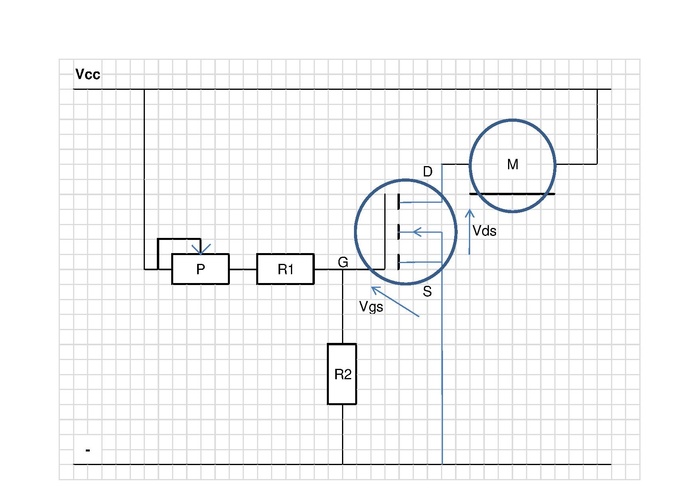
Nous avons utilisé les valeurs suivantes pour les composants P, R1 et R2 : P = 100kohms ; R1 = 10kohms et R2 = 100kohms.
Quand la tension sur R2 est suffisante, le canal entre le drain et la source est ouvert, le vibreur (M) fonctionne. Un ampèremètre est mis dans le circuit du vibreur pour visualiser le courant jusqu’à la valeur voulue.
Pour trouver la valeur de R1 : le potentiomètre est réglé pour une valeur de 0 ohm lors de la mise sous tension, puis augmenté de façon à avoir un courant de 100mA à travers le vibreur.
Ensuite, nous débranchons le tout pour mesurer la résistance du potentiomètre à ajouter à la valeur de R1, ce qui nous donne 5,5 kohms, soit la valeur de 15,5kohms (15kohms en valeur normalisée).
Nous remplaçons donc l’ensemble P et R1 par une résistance de cette valeur, et nous testons le bon fonctionnement pour entériner le schéma.
Canne électronique (c) Tom Pouce
Fiche technique pdf : [1] Cas d'usage. Mode de distribution Coût pour l'usager Acteurs identifiés
(c)Minitact
Fiche technique pdf : [2] Cas d'usage. Mode de distribution Coût pour l'usager Acteurs identifiés
Autres capteurs
Equipe
Capteurs qui pourraient être adaptés
http://www.robotshop.com/eu/fr/module-micro-lidar-tgmini-benewake-12-m.html
capteur radar doppler:
ou
Micro Lidar :
http://www.robotshop.com/en/benewake-tfmini-micro-lidar-module-ip65-12-m.html
LeddarTech LeddarOne Optical Rangefinder :
http://www.robotshop.com/en/leddartech-leddarone-optical-rangefinder-33v-uart.html
Benewake TFMINI Micro LIDAR Module IP65 (12 m):
http://www.robotshop.com/en/benewake-tfmini-micro-lidar-module-ip65-12-m.html